Государственный комитет по архитектуре и градостроительству при Госстрое СССР
ЦЕНТРАЛЬНЫЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ И ПРОЕКТНЫЙ ИНСТИТУТ ПО ГРАДОСТРОИТЕЛЬСТВУ (ЦНИИП градостроительства)
МЕТОДИЧЕСКИЕ РЕКОМЕНДАЦИИ по проектированию пешеходных сетей
Утверждены председателем
Научно-технического совета, директором института
В.Н. Белоусовым (протокол № 3 от 16 апреля 1987 г.)
Москва 1988
Содержание
Рассматриваются причины повсеместного распространения в городах стихийно возникающих пешеходных сетей. Основная из этих причин - неудовлетворительное положение в практике проектирования пешеходных сетей, вызванное отсутствием у проектировщиков методики, учитывающей психологию движения пешехода к цели и соответствующие требования к конфигурации сетей. В настоящих рекомендациях формулируются такого рода требования и рассматриваются методы практического построения жизнеспособных пешеходных сетей. Требования формулируются в геометрических терминах, а методы построения основаны на геометрических средствах.
Настоящее издание предназначено для широкого круга специалистов, связанных с проектированием и эксплуатацией пешеходных сетей и внешнего благоустройства, - проектировщиков и научных работников в области градостроительства и архитектуры, студентов вузов, работников коммунальных служб.
ВВЕДЕНИЕ
Современные крупные жилые массивы со свободной планировкой, получившие широкое распространение в градостроительной практике в последние тридцать лет, в процессе своего функционирования породили своеобразное явление - стихийное возникновение пешеходных сетей, дополняющих или заменяющих собой сети благоустроенных пешеходных дорог, построенных по проектам планировки и застройки. Повсеместная распространенность этого явления свидетельствует о том, что при проектировании пешеходных сетей упускаются важные закономерности пешеходного движения, вследствие чего пешеходные сети оказываются нежизнеспособными. Таким образом, возникает задача проектирования жизнеспособных пешеходных детей.
Проектировщики не располагают сегодня ни объективными критериями оценки качества пешеходных сетей, ни тем более методикой их проектирования. В то же время наблюдения над реализацией проектов приводят к выводу о неудовлетворительности проектных решений. В результате широкое распространение получило мнение, что единственно разумным является пассивный путь решения проблемы, т.е. отказ от проектирования пешеходных сетей в расчете на то, что в процессе эксплуатации запроектированного объекта (например, жилого комплекса) естественным образом сложатся сети пешеходных дорог, которые впоследствии можно благоустроить.
Подобный путь, однако, неприемлем по ряду причин. Во-первых, в силу ряда технических и организационных трудностей, связанных с существующей практикой финансирования и организации строительства, в результате которых стихийно возникшие пешеходные сети в большинстве случаев так и остаются неблагоустроенными. Более того, такие пешеходные сети считаются явлением незаконным и вредным, и организации, ведающие благоустройством и озеленением, ведут с ними постоянную борьбу. Во-вторых (и это главное), потому, что пешеходная сеть представляет собой материальную реализацию связей (корреспонденции) между всеми элементами жилого комплекса (или другого планировочного объекта) и существенно влияет на их взаимное размещение. Проект планировки и застройки должен обязательно включать пешеходную сеть как неотъемлемую и важнейшую подсистему. Следовательно, проблема пешеходных сетей требует конструктивного решения.
В настоящих рекомендациях рассматривается математическая задача построения на территории с уклоном не более 10 - 12% пешеходной сети, связывающей заданную систему каких-либо объектов (например, элементов жилой застройки и системы культурно-бытового и транспортного обслуживания). На содержательном уровне большое внимание уделено вопросам увязки проектирования пешеходных сетей с проектированием других подсистем - жилья, объектов обслуживания населения, транспортных сетей.
В задаче построения пешеходных сетей самым тесным образом переплетаются аспекты психологического, этического, эстетического, технического и экономического характера. Ни один из этих аспектов не должен упускаться из виду.
Материал рекомендаций состоит из трех разделов. В первом разделе рассматриваются общие вопросы построения пешеходных сетей рациональной конфигурации: определяются условия жизнеспособности пешеходных сетей, основанные на психологических закономерностях пешеходного движения; ставится математическая оптимизационная задача конструирования пешеходных сетей с учетом требований удобства передвижения и экономических требований. Методика решения этой задачи рассматривается в двух следующих разделах: во втором разделе излагаются рекомендации по построению пешеходных сетей в упрощенных частных случаях - от простейших к более сложным; в третьем разделе -вопросы построения пешеходных сетей в общем случае (при произвольном числе и произвольном размещении связуемых объектов с учетом существующей пешеходной сети и системы препятствий), а также вопросы взаимодействия пешеходных сетей в процессе проектирования с другими подсистемами (жилой застройкой, системой озеленения, системой обслуживания населения, системой городского транспорта).
Рекомендации ориентированы на широкий круг специалистов в области градостроительных научных исследований, проектирования, строительства и эксплуатации городов, поселков, рекреационных зон, лечебных, курортных, спортивных комплексов, садов, парков, а в профессиональном аспекте - на архитекторов, транспортных инженеров, работников городских и районных Советов, работников городского коммунального хозяйства.
Рекомендации разработаны канд. техн. наук, арх. А.П. Роммом. Автор выражает благодарность В.И. Плютинскому, В.В. Лившицу, А.И. Стрельникову, Т.И. Вольфтруб, О.В. Федорову, Л.Н. Авдотьину, К.Э. Александеру, Ю.П. Бочарову, Л.И. Павловой, М.Г. Бархину и многим другим лицам, оказывавшим помощь автору в работе по данной проблеме.
1. ОБЩИЕ ПОЛОЖЕНИЯ
1.1. ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ
1.1.1. В разделе 1 при рассмотрении задачи построения пешеходной сети в упрощенных частных случаях предполагается, что точки (объекты), которые эта сеть должна связать, уже заданы. Кроме того, должна быть задана совокупность существенных связей между заданными точками. Под существенными связями понимаются устойчивые связи, порождающие достаточно большие потоки пешеходов, т; е. потоки, превышающие некоторую минимальную величину, которая может быть принята равной ориентировочно десяти человекам в день, поскольку такой поток достаточен для протаптывания стихийного пешеходного пути на газоне среднего качества.
1.1.2. По характеру существенных связей все заданные точки дифференцируются на совокупность исходных и совокупность целевых точек. Под целевыми точками следует понимать основные фокусы тяготения пешеходных потоков, а под исходными -дисперсные источники этих потоков (строгое определение этих понятий здесь не приводится). В жилом комплексе с застройкой традиционного типа (башенные и секционные дома) в качестве исходных точек рассматриваются входы в жилые дома, а в качестве целевых - учреждения обслуживания населения и остановки общественного транспорта. Множество исходных точек, связанных с данной целевой точкой, называется ареалом влияния данной целевой точки. Размещение целевых точек и исходных точек, входящих в ареалы их влияния, является частью исходной информации, используемой при построении пешеходной сети.
1.1.3. Другая важная часть исходной информации - наличие на территории различного рода препятствий и преград, к числу которых относятся габариты зданий, заборы, ограды, колючие кустарники, реки, водные поверхности, транспортные магистрали - короче говоря, все естественные и искусственные объекты, являющиеся преградами с точки зрения пешеходного движения.
1.1.4. Деловой пешеходной сетью называется сеть, создаваемая с целью осуществления по ней деловых передвижений, в которых основным руководящим мотивом является стремление пешеходов достигнуть цели с минимальной, по возможности, затратой времени, сил и энергии. Сеть, запроектированная как деловая, может, как правило, с успехом выполнять и прогулочные функции. В настоящей работе рассматриваются вопросы проектирования деловых пешеходных сетей.
Деловая сеть состоит из прямолинейных участков (ребер, звеньев) и узлов точек, в которых сходятся два или несколько участков.
Маршрутом передвижения по сети называется множество точек плоскости, последовательно проходимых пешеходом при движении к цели. На каждом маршруте передвижения всегда могут быть указаны отправная и конечная точки (конечная точка называется также целью). Если точка А отправная, а точка S конечная, то маршрут будем обозначать м(A,S). Каждая точка маршрута может рассматриваться как отправная по отношению ко всем впереди лежащим точкам.
Основное качество, которым должна обладать проектируемая сеть, - это жизнеспособность. Сеть называется жизнеспособной в том случае, если после ее реализации в натуре она не дополняется и не заменяется сколько-нибудь существенным образом сетью стихийных пешеходных путей. При этом, однако, имеется в виду, что не все средства хороши для достижения указанной цели. Жизнеспособной может быть любая, в том числе и самая неудобная пешеходная сеть, если она жестко канализована с помощью развитой системы преград (заборов, оград, колючих кустарников) и административных мероприятий, исключающих какую-либо возможность возникновения стихийных направлений движения. Жизнеспособность сети, достигаемую такими средствами, нельзя назвать естественной, поскольку естественные закономерности пешеходного движения подавляются с помощью жестких искусственных мер. В таком случае можно говорить о строго искусственной жизнеспособности.
Вообще пешеходная сеть называется искусственно-жизнеспособной, если она связывает между собой точки, разделенные какой-либо системой препятствий, и естественно-жизнеспособной, если между связующими точками отсутствуют какие-либо препятствия. Естественно-жизнеспособные сети иногда называются также комфортными. В общем случае жизнеспособная сеть должна представлять собой совокупность естественно-жизнеспособных фрагментов, связанных друг с другом искусственно-жизнеспособными участками.
1.2. УСЛОВИЯ ЖИЗНЕСПОСОБНОСТИ ПЕШЕХОДНОЙ СЕТИ
1.2.1. При построении пешеходных сетей необходимо учитывать условия естественной жизнеспособности. Эти условия имеют геометрический характер и тесно связаны с психологическим механизмом, регулирующим поведение пешехода при его движении к цели. Основную роль в этом механизме играет подсознательная зрительная оценка угла между направлением движения в каждой точке маршрута и направлением на цель. Такой угол будем называть контрольным углом и обозначать ψ.
С точки зрения пешехода, стремящегося быстрее дойти до цели, наиболее удобным является прямолинейное направление движения к цели. Однако такая возможность имеется далеко не всегда, и пешеход вынужден пользоваться теми благоустроенными путями, которые уже существуют.
Если в некоторый момент времени пешеход находится в точке А и движется под углом ψ по отношению к целевой точке S со скоростью V, то при постоянной скорости движения V скорость приближения к цели VS зависит от величины контрольного угла ψ : VS = Vcosψ (рис. 1), поскольку является проекцией вектора скорости V на направление AS. При ψ → 0 , VS → V, при ψ → 180° VS → -V. Таким образом, скорость приближения к цели лежит в пределах -V ≤ VS ≤ V.
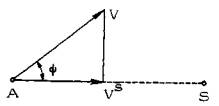
Рис. 1. Скорость приближения к цели V зависит от величины контрольного угла ψ : VS = Vcosψ
Тесная связь между величиной контрольного угла и скоростью приближения к цели, которую пешеход, естественно, стремится максимизировать при постоянстве скорости движения, дает возможность контролировать вторую из этих величин с помощью подсознательной зрительной оценки первой.
Обращает на себя внимание следующее важное обстоятельство: при движении по прямой величина контрольного угла по отношению к любой точке S, лежащей вне этой прямой, непрерывно возрастает (рис. 2).
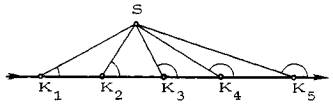
Рис. 2. При движении по прямой контрольный угол непрерывно возрастает
1.2.2. Рассмотрим механизм возникновения стихийных пешеходных путей. Пешеход выходит из точки А и движется к цели S по предлагаемой ему пешеходной асфальтированной дороге AKS (рис. 3).
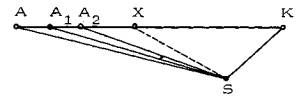
Рис. 3. Возникновение стихийных пешеходных путей: дискомфорт движения на участке AK непрерывно возрастает, и в точке X возникает конфликтная ситуация: пешеход идет по газону напрямик к цели S
По мере продвижения вперед по участку AK величина контрольного угла по отношению к целевой точке S постепенно возрастает: ÐKAS < ÐKA1S < ÐKA2S, следовательно, скорость приближения к цели на участке AK непрерывно падает. Если вдоль этого участка нет никаких препятствий, то в любой его точке пешеход имеет две возможности: либо продолжать движение по асфальтированной дороге, либо свернуть с нее и двигаться к точке S напрямую по газону. Выбор осуществляется исходя из сравнения величин дискомфорта в обеих альтернативах. Дискомфорт D движения определяется в основном тремя факторами: скоростью приближения к цели VS, физическими условиями движения μ и психологическими условиями движения ρ:
D = D(VS, μ, ρ).
Физические условия движения по асфальтовой дорожке лучше, чем по газону: поверхность более ровная, более чистая и обеспечивает хорошее сцепление с обувью. Психологические условия движения по асфальтовой дорожке также лучше, поскольку вытаптывание газонов противоречит этическим представлениям человека.
В любой точке участка AK происходит сопоставление величин дискомфорта движения по асфальтовой дорожке
D1 = D(V1S, μ1, ρ1).
с величиной дискомфорта движения по газону
D2 = D(V2S, μ2, ρ2).
Вначале, очевидно, D1 < D2 , и пешеход движется по асфальтовой дорожке. Но по мере движения величина D1 увеличивается, поскольку уменьшается скорость приближения к цели V1S, в то время как все остальные величины μ1, ρ1, V2S, μ2, ρ2, а следовательно, и величина дискомфорта D2 остаются без изменений. Наконец, в некоторой точке X величина D1 становится равной D2, и с этого момента дальнейшее движение по асфальтированной дорожке связано с большим дискомфортом, чем движение к цели прямо по газону. Здесь-то и возникает стихийное направление движения.
Таким образом, для пешехода психологически приемлем определенный диапазон значений контрольного угла, начиная от нуля. Если же при движении по имеющемуся благоустроенному пути величина контрольного угла выходит за пределы допустимого диапазона, то возникает конфликтная ситуация: пешеход оставляет предлагаемый ему маршрут движения и движется напрямик к цели. Верхняя граница диапазона допустимых значений контрольного угла называется критическим значением и обозначается Ψ.
1.2.3. Критическое значение контрольного угла играет основную роль при построении пешеходных сетей. Как показывают результаты натурных исследований, при движении пешеходного потока в стандартных условиях (в летнее время года, на газоне среднего качества) оно равно 30°. Благоустроенная пешеходная сеть, жизнеспособная в стандартных условиях, тем более жизнеспособна при неблагоприятном состоянии территории (имеется в виду наличие на территории снега, грязи, неровностей, мусора и т.п.).
1.2.4. Для обеспечения естественной жизнеспособности пешеходной сети необходимо, чтобы а каждой точке каждого из маршрутов, реализующих существенные связи исходных и целевых точек, величины контрольных углов по отношению ко всем впереди лежащим точкам маршрутов не превышали значения 30°. Это условие является не только необходимым, но и достаточным.
1.2.5. Условие естественной жизнеспособности используется для проверки на комфортность сетей и отдельных маршрутов. Для проверки маршрута, имеющего конфигурацию ломаной линии, достаточно рассмотреть выполнение условия в вершинах ломаной (рис. 4). При движении по участку AK1 величина контрольного угла по отношению к точке S непрерывно возрастает, достигая максимума в точке К1, в которой происходит изменение направления движения.
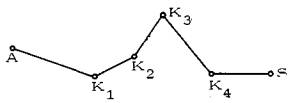
Рис. 4. Маршрут из А в S нежизнеспособен, поскольку на участках K2K3 и K3K4 величина контрольного угла выходит за пределы 30°
При этом сразу, скачком меняется величина контрольного угла. Таким образом, достаточно выяснить, нарушается ли условие комфортности по отношению к точке S при входе в точку K1. Если нет, то оно выполнено заведомо на всем участке AK1. Точно так же при движении по участку AK1 величина контрольного угла непрерывно возрастает по отношению к точкам K2, K3, K4, и достаточно выяснить, нарушается ли условие комфортности по отношению к этим точкам при входе в точку K1. Аналогичным образом проверяется выполнение условия комфортности при входе в вершины K2, K3 и K4. Следовательно, число проверяемых точек равно числу вершин ломаной, по которой проходит маршрут. Ниже будет рассмотрен более простой и удобный способ проверки сети на комфортность.
1.3. ПОСТАНОВКА ЗАДАЧИ
1.3.1. Условие жизнеспособности рассматривается как основное условие, которому должна удовлетворять проектируемая пешеходная сеть. Частным случаем жизнеспособных пешеходных сетей являются естественно-жизнеспособные сети, которые строятся при отсутствии препятствий.
Для зафиксированной системы исходных и целевых точек может быть построено, вообще говоря, бесконечное множество естественно-жизнеспособных сетей. Таким образом, имеется возможность выбора, т.е. возможность оптимизации. Поскольку комфортные характеристики сети достаточно учитываются условием естественной жизнеспособности, оптимизация ведется по критерию минимума строительных и эксплуатационных затрат.
Решение этой задачи "в лоб" связано с серьезными трудностями, поэтому вместо оптимизации комфортной сети по критерию суммарных затрат осуществляется оптимизация ее по критерию суммарной длины ее ребер. При этом отклонение от оптимума по первому критерию незначительно (доли процента). Поэтому математическая задача, являющаяся предметом непосредственного рассмотрения, формулируется следующим образом: для заданного множества целевых точек и исходных точек их ареалов построить связующую их естественно-жизнеспособную сеть, оптимальную по критерию минимума суммарной длины всех ее ребер.
1.3.2. Вопросы конфигурации пешеходной сети рассматриваются независимо от расчета потоков по ней. Возможность такого подхода вытекает из того, что, во-первых, условие естественной жизнеспособности, существенно влияющее на конфигурацию сети, никак не связано с величинами потоков, поскольку критическое значение контрольного угла является константой, и во-вторых, оптимизация ведется по критерию длины сети, а не по критерию суммарных затрат и, следовательно, не связана ни с величинами сечений участков сети, ни с определяющими их потоками.
Но даже с учетом этого задача конструирования оптимальной естественно-жизнеспособной сети остается весьма сложной. Чтобы справиться со сложностью задачи, ее рассмотрение строится индуктивно: вначале вводится целый ряд упрощающих предположений и, по мере решения упрощенных версий задачи, постепенно снимаются введенные упрощения и, в конечном итоге, осуществляется переход к уровню сложности, адекватному сложности реальной проектной задачи. Основные упрощения на первом шаге состоят в исключении из рассмотрения системы препятствий и заданной (существующей) сети пешеходных путей, а также в ограничении числа целевых точек одной единственной при произвольном числе и произвольном взаиморазмещении исходных точек.
Задача в простейшей версии, включая все перечисленные ограничения, рассматривается в разделе 2.1. В последующих трех разделах эти ограничения последовательно снимаются, и задача приобретает необходимые общие контуры. Методы решения каждой из более общих версий задачи носят, в известном смысле, рекурсивный характер, т.е. строится некоторая последовательность действий, позволяющая свести решаемую задачу к уже известной, рассмотренной ранее.
1.4. РАБОЧЕЕ ПОЛЕ - ОСНОВНОЙ ИНСТРУМЕНТ ПОСТРОЕНИЯ ПЕШЕХОДНОЙ СЕТИ
1.4.1. Основным инструментом построения естественно-жизнеспособной сети и анализа произвольной сети на комфортность является понятие рабочего поля. Отрезок прямой AS, соединяющий отправную точку А с конечной точкой S, называется рабочей осью. Дугу окружности, построенную на рабочей оси как на хорде и вмещающую вписанный угол Φ = 150° (т.е. угол, смежный с углом Ψ = 30°), называют рабочей дугой. Нетрудно показать, что длина радиуса рабочей дуги равна длине рабочей оси AS (рис. 5). Рабочую дугу будем обозначать D(S, A), где S и А - концы рабочей оси.
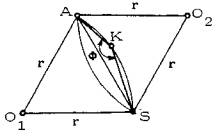
Рис. 5. Рабочее поле между точками А и S ограничено двумя дугами окружностей радиуса r = AS
Часть плоскости, заключенная между двумя рабочими дугами, симметричными относительно рабочей оси, называется рабочим полем. Рабочее поле между точками S и А обозначается R(S, а) и обладает следующими важными свойствами: любой маршрут между точками S и А в пределах рабочего поля, представляющий собой выпуклую несамопересекающуюся ломаную, комфортен при движении в обоих направлениях; любой маршрут между точками S и А , выходящий за пределы рабочего поля, некомфортен, т.е. не удовлетворяет условию естественной жизнеспособности. х)
х) Это утверждение, как и все последующие теоремы, строго доказано. Однако, учитывая характер и ограниченный объем настоящего издания, доказательства здесь не приводятся.
Рабочая ось разделяет рабочее поле на два сегмента, или полуполя, - левое и правое, если рассматривать их в направлении от целевой точки, обозначаемые соответственно R└(S, A) и R┘(S, А). Следует различать левую и правую рабочие дуги, введя для них обозначения D└(S, А) и D┘(S, А). Если из данной целевой точки построены рабочие поля к нескольким исходным точкам, то имеется группа правых и группа левых полуполей. Любые два полуполя из одной группы называются одноименными, а из разных групп - разноименными. Аналогично будем различать одноименные и разноименные рабочие дуги.
1.4.2. Используя в качестве практического инструмента такого анализа понятие рабочего поля, можно осуществить проверку на комфортность произвольной пешеходной сети.
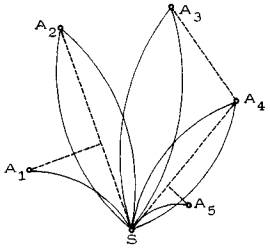
Рис. 6. Использование рабочих полей как инструмента проверки пешеходной сети по условию естественной жизнеспособности: маршруту м(S, А1), м(S, А3), м(S, А5) нежизнеспособны
Пусть, например, запроектирована некоторая пешеходная сеть, связывающая исходные точки А1, А2, ... , А5 с целевой точкой S (рис. 6). Анализ сети на комфортность сводится к выделению всех маршрутов на сети и исследованию каждого из них на комфортность. В нашем примере таких маршрутов, очевидно, ровно столько, сколько исходных точек (маршруты рассматриваем как из целевой точки в исходные, так и в обратном направлении, т.е. как двухсторонне ориентированные). Все пять маршрутов представляют собой выпуклые ломаные (отрезок - частный случай выпуклой ломаной). Маршруты м(S, А1), м(S, А3), м(S, А5) дискомфортны, поскольку выходят за пределы своих рабочих полей. Следовательно, заданная сеть нежизнеспособна.
2. ПОСТРОЕНИЕ ПЕШЕХОДНЫХ СЕТЕЙ В УПРОЩЕННЫХ ЧАСТНЫХ СЛУЧАЯХ
2.1. ЕСТЕСТВЕННО-ЖИЗНЕСПОСОБНАЯ СЕТЬ С ОДНОЙ ЦЕЛЕВОЙ ТОЧКОЙ
Простейший случай (Центральная теорема)
2.1.1. Свойства рабочих полей используются для построения оптимальной естественно-жизнеспособной сети в простейшем случае, когда заданы две исходные точки и одна целевая. (Случай одной исходной точки и одной целевой тривиален: сеть представляет собой отрезок прямой, соединяющей исходную точку с целевой, т.е. совпадает с рабочей осью.)
Пусть заданы две исходные точки А1, и А2 и целевая точка S (рис. 7). Если точки А1 и А2 расположены относительно S таким образом, что ÐА1SА2 < 60°, то их рабочие поля пересекаются, образуя рабочую лунку z. Диаметр рабочей лунки (наибольшая из ее хорд) соединяют точку S с точкой T, которая является вершиной лунки, лежащей в точке пересечения рабочих дуг в случае, если ни одна из исходных точек не лежит внутри рабочего поля другой (рис. 7а), или, в противном случае, в той исходной точке, которая лежит внутри рабочего поля другой (рис. 7б). Если же ÐА1SА2 > 60°, то рабочие поля не пересекаются и не имеют ни одной общей точки, кроме точки S (рис. 7в),
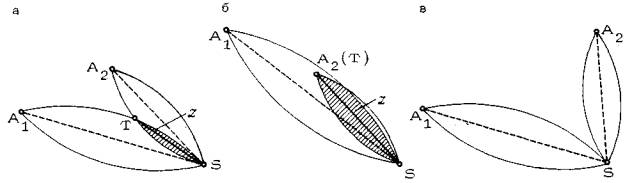
Рис. 7. Три возможных случая размещения связуемых точек (рабочие лунки заштрихованы): а - рабочие поля пересекаются, и ни одна из исходных точек не попадает в рабочее поле другой; б - рабочие поля пересекаются, и одна из исходных точек (точка А2) попадает в рабочее поле другой; в - рабочие поля не пересекаются (ÐА1SА2 ≥ 60°)
В случае пересечения рабочих полей маршруты м(A1, S) и м(A2, S) можно скооперировать, таким образом, чтобы они имели общий участок KS, лежащий в пределах рабочей лунки (рис. 8). Оба маршрута комфортны, поскольку лежат в пределах своих рабочих полей и представляют собой выпуклые ломаные. То же справедливо и для маршрутов движения в обратном направлении м(S, A1) и м(S, A2). Если рабочие поля не пересекаются, то возможности кооперирования маршрутов нет, и сеть представляет собой пару участков, совпадающих с рабочими осями.
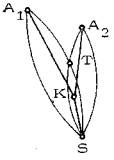
Рис. 8. На участке KS, лежащем в рабочей лунке, маршруты, связывающие точки А1 и А2 с точкой S, жизнеспособны и кооперируются. Где следует разместить узел K, чтобы длина связующей сети была минимальной
2.1.2. Вопрос о том, где именно в пределах общей лунки рабочих полей следует разместить узел K с точки зрения минимизации длины сети, решается следующей теоремой.
Центральная теорема
Пусть рабочие поля R(S, A1) и R(S, A2) пересекаются, образуя рабочую лунку z. Минимум длины естественно-жизнеспособной сети, связывающей исходные точки А1, А2 с целевой точкой S, достигается при размещении узла K в вершине T лунки z (рис. 9).
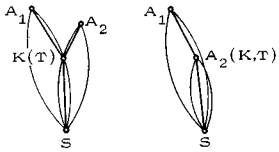
Рис. 9. Центральная теорема: минимум длины связующей сети достигается при размещении узла K в вершине рабочей лунки (два случая)
Центральная теорема играет важную роль в разработке методов конструирования пешеходных сетей. Опираясь на нее, можно конструировать сети с произвольным числом исходных точек.
Собирающий сектор
2.1.3. Часть плоскости, заключенная между двумя лучами Sm1 и Sm2 проведенными из целевой точки S через какие-либо две исходные точки при условии, что Ðm1Sm2, меньше 60°, называется собирающим сектором. Лучи Sm1 и Sm2 называются границами собирающего сектора (рис. 10).
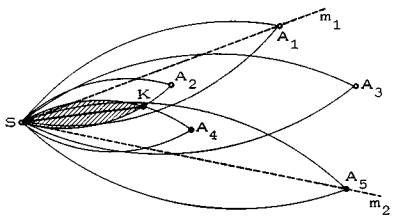
Рис. 10. Общая лунка всех рабочих полей собирающего сектора (заштрихована) - опорная лунка; точки A2 и А4 - крайние точки собирающего сектора (их рабочие поля образуют опорную лунку)
Собирающий сектор обладает следующим важным свойством: рабочие поля всех исходных точек, лежащих в его пределах, пересекаются попарно друг с другом, образуя некоторое множество рабочих лунок, среди которых можно найти такую, вершина которой принадлежит всём рабочим лункам, а следовательно, и всем рабочим полям собирающего сектора одновременно. Эту лунку назовем опорной лункой, а ее диаметр (т.е. наибольшую из ее хорд) -опорным ребром. Очевидно, что опорное ребро принадлежит всем рабочим полям собирающего сектора одновременно. На рис. 10 точки А1, А2, ... , А5 являются исходными, опорная лунка заштрихована, опорное ребро обозначено SK.
2.1.4. Рабочее поле некоторой исходной точки называется пустым, если оно не содержит ни одной из других исходных точек. Рабочая лунка, принадлежащая одновременно всем пустым рабочим полям, также пуста.
Исходные точки, рабочие поля которых образуют общую лунку всех пустых рабочих полей, называются крайними. Крайних точек обычно две, но иногда; может быть только одна крайняя точка (точка А3 на рис. 11). На рис. 10 крайними .являются точки А2, А4. Будем -различать правую и левую крайние точки, рассматривая их в направлении от целевой точки. Крайние точки могут лежать внутри собирающего сектора или на его границах.
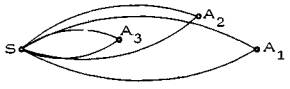
Рис. 11. Вырожденный случай: собирающий сектор с одной крайней точкой (точка А3)
Как правило, опорная лунка совпадает с рабочей лункой крайних точек. Однако это не обязательно. На рис. 12 штриховкой выделена опорная лунка SF1, принадлежащая всем рабочим полям собирающего сектора A1SA4. Рабочие поля R(S, A1) и R(S, A4), пересечением которых образована эта лунка, не пусты. Пусты рабочие поля R(S, A2) и R(S, A3), и, следовательно, точки А2 и А4 - крайние, но их рабочая лунка SF2 не является опорной, поскольку не принадлежит рабочим полям R(S, a1) и R(S, A4). Для того чтобы возникла подобная ситуация, необходимо, чтобы хотя бы одна из рабочих дуг, ограничивающих опорную лунку, пересекалась с одноименной рабочей дугой, ограничивающей пустое рабочее поле. В примере на рис. 12 таких точек пересечения две E1 и E2. Такие точки называются точками перелома.
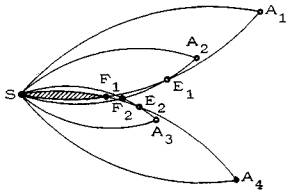
Рис. 12. Опорные дуги: А2Е1F1S и А3Е2F1S
Рассмотрим дугу, состоящую из двух участков, первый из которых принадлежит рабочей дуге крайней точки и соединяет крайнюю точку с соответствующей точкой перелома, а второй принадлежит рабочей дуге, ограничивающей опорную лунку, и соединяет точку перелома с целевой точкой. Эта дуга называется опорной. На рис. 12 опорными являются дуги А2Е1F1S и А3Е2F1S. В случае совпадения опорной лунки с рабочей лункой крайних точек опорные дуги совпадают с рабочими дугами крайних точек (см. рис. 10). Такая ситуация встречается наиболее часто.
Теорема о конечном нижнем ребре
2.1.5. Если в построенной или строящейся сети маршрут из исходной точки А в целевую точку S проходит через некоторое ребро d, то будем говорить, что точка А опирается на ребро d. Поскольку по определению опорное ребро принадлежит рабочим полям всех исходных точек собирающего сектора, оно может принадлежать всем маршрутам между целевой точкой и исходными точками собирающего сектора одновременно, т.е. может быть принято в качестве ребра конструируемой естественно-жизнеспособной сети, на которое опираются все исходные точки.
Ребро сети, непосредственно выходящее из целевой точки, называется конечным нижним ребром.
Теорема о конечном нижнем ребре
Оптимальная естественно-жизнеспособная пешеходная сеть, связывающая целевую точку со всеми исходными точками собирающего сектора, всегда имеет одно конечное нижнее ребро, совпадающее с опорным ребром собирающего сектора.
Доказательство этой теоремы (мы его не приводим) опирается на Центральную теорему. Рис. 13, на котором опущены все рабочие дуги, кроме опорных, иллюстрирует теорему о конечном нижнем ребре. Поскольку SK1 - опорное ребро, то, исходя из теоремы, оно должно быть принято в качестве конечного нижнего ребра оптимальной естественно-жизнеспособной сети, связывающей исходные точки А1, А2, ... , А7 с целевой точкой S. Построение опорного ребра является первый шагом построения сети в собирающем секторе.

Рис. 13. Конечное нижнее ребро строящейся сети совпадает с опорным ребром SK1 собирающего сектора
Структура сети в собирающем секторе
2.1.6. Приступая к построению пешеходной сети, необходимо ясно представить себе ее структуру. Для этого понадобится три определения теории графовх) Пусть задан граф G. Цепью называется такая конечная последовательность вершин графа, при которой каждая вершина соединена ребром с соседней. Если первая и последняя вершины цепи совпадают, то такая цепь называется циклом. Деревом называется связный граф, не содержащий циклов.
х) Графом называется геометрическая фигура, состоящая из точек (вершин) и линий (ребер), соединяющих определенные пары этих вершин и представляющих связи между ними. См., например, Н. Кристофидес. Теория графов (алгоритмический подход). М., Мир, 1978.
Теорема
В оптимальной естественно-жизнеспособной сети, связывающей исходные точки собирающего сектора с целевой, в каждом узле сходится не более чем три ребра, и граф сети представляет собой дерево.
Слова "не более", встречающиеся в теореме, означают следующее. При движении от целевой точки вверх по сети (т.е. по направлению к исходным) мы обнаружим, что в каждом чистом узле сети (т.е. в узле, не совмещающемся ни с какой из заданных исходных точек) входящему участку, по которому мы пришли к узлу, соответствует два выходящих участка, по которым мы можем продолжать движение вверх. В смешанном узле (т.е. в узле, совпадающем с одной из заданных точек) входящему участку соответствует, как правило, один выходящий участок (рис. 14). Отсюда следует, что из узла К1, являющегося чистым узлом (см. рис. 13), должно выходить два ребра (две ветви), на каждое из которых опирается некоторое подмножество множества исходных точек. Следовательно, ближайшая задача после построения конечного нижнего ребра сети - разбиение множества исходных точек на эти два подмножества. Если же узел K1 смешанный, то он рассматривается в качестве промежуточной целевой точки, и из него строится новое опорное, ребро.
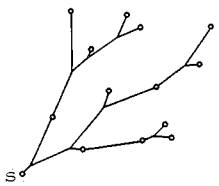
Рис. 14. Структура сети в собирающем секторе: сеть имеет одно конечное нижнее ребро, выходящее из целевой точки S, в чистых узлах имеет дихотомическое ветвление ( две выходящие ветви), в смешанных узлах - одну выходящую ветвь; граф сети - дерево
Кривая равного тяготения
2.1.7. В качестве вспомогательного средства, существенно облегчающего отыскание оптимального (или близкого к оптимальному) разбиения, удобно использовать кривую равного тяготения, представляющую собой геометрическое место точек, для которых варианты отнесения к левой и правой ветвям сети равноценны по критерию суммарной длины сети. Если точка С принадлежит кривой равного тяготения, то вариант сети, в котором точка С относится к левой ветви, имеет ту же длину, что и вариант сети, в котором точка С относится к правой ветви (рис. 15).
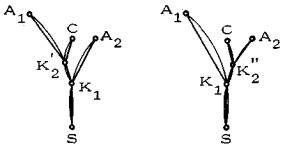
Рис. 15. Точки A1 и А2 - крайние точки собирающего сектора; SК1 - конечное нижнее ребро. Если точка С лежит на кривой равного тяготения, варианты ее присоединения к левой и правой ветвям равноценны
Построив кривую, обладающую указанным свойством, существенно легче произвести разбиение множества исходных точек на левое и правое подмножества. Например, если все исходные точки (за исключением крайних) лежат слева (справа) от кривой равного тяготения, то они все, очевидно, относятся к левой (правой) ветви. Весьма часто расположение исходных точек таково, что все точки слева от кривой выгодно отнести к левой ветви, а все точки справа от кривой - к правой ветви.
2.1.8. Построение кривой равного тяготения осуществляется следующим образом (рис. 16).
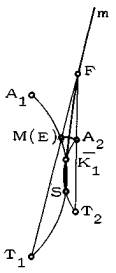
Рис. 16. Построение кривой равного тяготения (кривая, точнее ее аппроксимация, показана жирной линией): K1F - начало кривой; Fm - продолжение кривой; SK1 - конечное нижнее ребро
Пусть А - та из крайних точек, которая лежит дальше от вершины опорной
лунки K Прежде всего
найдем две важные точки T1
и T2. Точка T1 лежит на
продолжении опорной дуги D(S, A1) за точку S таким образом, что K1T1 = SA1. Аналогично
точка T2
лежит на продолжении опорной дуги D(S, A2) за точку S таким образом, что K1T2 = SA2. После того
как фокусы найдены, радиусом K1А2
(А2 - та из крайних точек, которая лежит ближе к K1) с центром в точке K1 опишем дугу
окружности до пересечения с дугой ![]() в точке E. Из точек T1 и T2 проведем
соответственно через точки E и А2 лучи до взаимного пересечения. Точка
пересечения F
принадлежит кривой. Еще одна точка кривой может быть указана сразу: это узел К1.
Фрагмент кривой от узла К1 до точки F будем называть началом кривой, а
остальную, бесконечную часть - ее продолжением.
в точке E. Из точек T1 и T2 проведем
соответственно через точки E и А2 лучи до взаимного пересечения. Точка
пересечения F
принадлежит кривой. Еще одна точка кривой может быть указана сразу: это узел К1.
Фрагмент кривой от узла К1 до точки F будем называть началом кривой, а
остальную, бесконечную часть - ее продолжением.
С достаточной для практических нужд точностью в качестве начала кривой может быть принят отрезок K1F (если же точка F за пределами чертежа, то - перпендикуляр, восставленный к отрезку ЕА2 из его середины), а в качестве продолжения - луч из точки F, лежащий на прямой T1F.
2.1.9. Часть собирающего сектора, расположенная слева от кривой равного тяготения (точнее, область, ограниченная кривой равного тяготения, левой границей собирающего сектора и прямой, проведенной через конец опорного ребра и левую опорную точку), называется зоной z, а часть собирающего сектора справа от кривой - зоной R.
Если собирающий сектор кроме крайних точек содержит еще некоторое множество других исходных точек, расположенных одновременно в зоне z (в зоне R), то все точки этого множества относятся к левой (правой) ветви строящейся сети. Если исходные точки лежат по обе стороны от кривой, то вопрос о разбиении решается в зависимости от конкретного размещения точек как относительно кривой равного тяготения, так и относительно друг друга.
Во многих случаях конфигурация множества исходных точек такова, что подмножество точек, расположенное в зоне z, с очевидностью может быть отнесено к левой ветви, а подмножество точек в зоне R - к правой (рис. 17а). В других случаях конфигурация такова, что все или часть точек, лежащих в зоне z (в зоне R), выгодно присоединить к правой (левой) ветви. Так, в ситуации на рис. 17б необходимость присоединения всех исходных точек, в том числе и тех, которые лежат в зоне Z , к правой ветви очевидна.
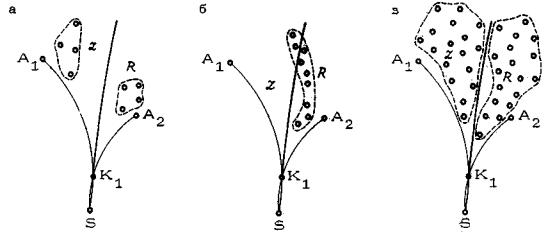
Рис. 17. Использование кривой равного тяготения для разбиения множества исходных точек на подмножества левой (z) и правой (R) ветвей (различные случаи)
Не представляет затруднений и ситуация с большим числом исходных точек, достаточно равномерно распределенных в собирающем секторе (рис. 17в). Все точки, лежащие в зоне z, можно отнести к левой ветви, а точки в зоне R - к правой ветви. Если при этом не обязательно достигается глобальный оптимум сети, то заведомо достигается хорошее приближение, вполне достаточное с практической точки зрения.
Разумеется, не во всех случаях задача разбиения множества исходных точек на два подмножества решается легко. В зависимости от конкретной конфигурации разбиваемого множества точек проектировщик может испытывать более или менее серьезные колебания в выборе того или иного разбиения. Однако, число возникающих альтернатив, как правило, не превышает двух-трех, и они могут быть сопоставлены непосредственно.
Построения в собирающем секторе
2.1.10. Рассмотрим ситуацию, которая возникает в тот момент, когда множество точек собирающего сектора разбито на два подмножества, относимые к левой и правой ветвям строящейся сети (см. рис. 17а). Выбираем сначала одно подмножество (например, левое). Добавим к нему левую крайнюю точку, получаем множество точек, опирающихся на еще не построенное левое ребро, выходящее из узла K1. Узел K1 следует теперь рассматривать как промежуточную целевую точку, а точки левой ветви как точки нового собирающего сектора (второго ранга), и следующий шаг построения сети сводится к двум основным рассмотренным выше операциям:
1) отысканию крайних точек и построению опорного ребра, связывающего узел K1, построенный на предыдущем шаге (промежуточную целевую точку), с новым узлом K2, который лежит на пересечении опорных дуг;
2) разбиению рассматриваемого множества точек (в данном случае левого подмножества первоначального множества точек) на два подмножества, одно из которых относится к левой ветви (второго ранга), выходящей из узла K2, а другое - к правой ветви (второго ранга).
Далее все повторяется снова по отношению к новому выбранному подмножеству. Порядок выбора очередного подмножества на каждом шаге, вообще говоря, безразличен и определяется соображениями удобства. При отыскании крайних точек и построении опорного ребра на очередном шаге для обеспечения комфортности сети необходимо осуществлять дополнительный контроль по отношению к целевой точке и всем ранее построенным узлам, ведущим в целевую точку. Заметим, что на каждом шаге, кроме самого первого, в действительности отыскивается только одна крайняя точка, поскольку в качестве второй всегда принимается одна из крайних точек предыдущего шага.
Поскольку число точек собирающего сектора конечно, то последовательность разбиений первоначального множества неизбежно приводит к тому, что на некотором шаге очередное выбранное множество будет содержать всего одну точку, которая непосредственно соединяется ребром с последним узлом. При дальнейших разбиениях каждая исходная точка рано или поздно оказывается единственным элементом рассматриваемого множества, и остается лишь построить ребро, связывающее ее с узлом, по отношению к которому рассматривается данное множество.
Таким образом, происходит постепенное продвижение от нижних ребер сети к верхним до тех пор, пока не будет построена вся сеть, т.е. пока в нее не будут вовлечены все исходные точки первоначального собирающего сектора. Понятия целевой точки, собирающего сектора и его вершины, крайних точек, опорного ребра в описанной процедуре являются, как нетрудно видеть, относительными и используются на каждом новом шаге построения сети в новом контексте.
2.1.11. Рассмотрим последовательность построения сети в собирающем секторе на конкретном примере. Пусть взаиморазмещение исходных точек таково, как представлено на рис. 18а. В целях разгрузки чертежа исходные точки А1, А2, ... , А8 обозначены соответственно 1, 2, ... , 8. Выделим три фазы построения сети, каждая из которых содержит несколько элементарных шагов, включающих две рассмотренные выше операции, и представлена на отдельном чертеже.
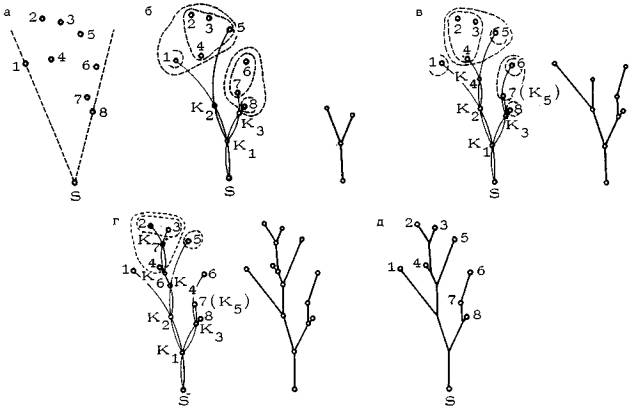
Рис. 18. Построение сети в собирающем секторе (сквозной пример): а - заданное размещение исходных точек (1, 2,..., 8); пунктирные линии - границы собирающего сектора; б - первая фаза построения: тонкой линией показаны рабочие дуги, более толстой- построенные ребра сети, пунктирными линиями - подмножества левой и правой ветвей (внешние - для построения ветвей K1K2 и K1K3, внутренние - для дальнейших построений); в - вторая фаза построения: добавлены ребра K2A1, K2K4, K1K3, K3K5, K5K6; г - третья (завершающая) фаза построения: добавлены ребра K2K4, K4A5, K3A8; д - построенная сеть
В первой фазе (рис. 18б) последовательность действий такова. Сначала выделяются крайние точки А1 и А8 , строятся опорные дуги D┘(S, A1) и D└(S, A8), на пересечении которых находится первый узел K1. сети, и строится опорное ребро SK1; производится разбиение множества исходных точек {А1, ... , А8} на два подмножества {А1, ... , А5} и {А6, ... , А8}, относимые соответственно к левой и правой ветвям сети. Далее поочередно рассматриваются выделенные подмножества исходных точек и на них осуществляются построения. Начнем, например, с рассмотрения собирающего сектора второго ранга с вершиной в K1, включающего точки множества {А1, ... , А5} левой ветви. В этом секторе выделяется крайняя точка А5 и строится опорная дуга D┘(K1, А5) (вторая крайняя точка - это точка А1, являющаяся крайней на первом шаге, а вторая опорная дуга D┘(K1, А1) является частью дуги D┘(S, А1), опорной на первом шаге); на пересечении опорных дуг фиксируется узел K2, строится ребро K1K2 и осуществляется разбиение множества {А1, ... , А5} на два подмножества {А1} и {А1, ... , А5}, относимые соответственно к левой и правой ветвям, потенциально выходящим из K2. Рассмотрим далее второй собирающий сектор второго ранга с вершиной в K1, включающий точки A6, А7, А8 правой ветви, потенциально выходящей из K1. В этом секторе выделяется крайняя точка А7 и строится опорная дуга D┘(K1, А7) (вторая крайняя точка А8 и опорная дуга D└(K1, А8) наследуются от более раннего шага); на пересечении опорных дуг фиксируется узел K3 и строится ребро K1K3; осуществляется разбиение множества {А6, ... , А8} на два подмножества {А6, А7} и {А8}, относимые соответственно к левой и правой ветвям, потенциально выходящим из K3. Таким образом, результатом первой фазы является построение трех ребер сети SK1, K1K2, K1K3 и разбиение множества еще не включенных в сеть исходных точек на подмножества {А1}, {А2, ... , А5},{А6, А7}, {А8}, первые два из которых относятся к левой и правой ветвям, потенциально выходящим из K2, а вторые два - к левой и правой ветвям, потенциально выходящим из K3.
Последовательность построений во второй и третьей фазах представлена на рис. 18в и 18г соответственно.
Сеть построена, поскольку в нее вовлечены все исходные точки (не осталось ни одной изолированной точки). Окончательная конфигурация сети иллюстрируется рис. 18д, где в целях более рельефного представления конфигурации удалены все вспомогательные элементы чертежа, рабочие дуги и обозначения узлов, имеющие значение только в процессе построения сети.
Построение сети в ситуации с несколькими собирающими секторами
2.1.12. До сих пор мы рассматривали построение сети в одном собирающем (относительно целевой точки) секторе. Однако расположение исходных точек относительно целевой в общем случае таково, что они не всегда могут быть охвачены одним собирающим сектором, поскольку величина собирающего сектора всегда меньше 60°. Таким образом, встает задача разбиения множества исходных точек, окружающих целевую точку, на подмножества, образующие собирающие секторы. Как только подобное разбиение осуществлено, дальнейшее построение сети с одной целевой точкой сводится к поочередному (в произвольном порядке) построению сети в отдельных собирающих секторах, т.е. к задаче, которую мы уже умеем решать.
Задача оптимального разбиения на собирающие секторы представляет большие трудности. Имеющиеся рациональные алгоритмы слишком трудоемки, чтобы приводить их в рекомендациях, рассчитанных на внемашинное проектирование пешеходных сетей. В то же время данная задача относится к числу задач, в которых использование интуиции проектировщика дает весьма хорошие приближения к оптимуму. Поэтому в этом разделе можно ограничиться введением нескольких новых понятий и рассмотрением некоторых полезных приемов, а также соображений, которыми следует руководствоваться при распределении исходных точек по собирающим секторам.
2.1.13. Пусть задана целевая точка S и произвольное число исходных точек, расположенных относительно S произвольным образом (рис. 19). Проведем из точки S рабочие оси ко всем исходным точкам. Секторы, образуемые попарно соседними рабочими осями, будем называть элементарными. Выделим из элементарных секторов те, величина которых больше или равна 60°, и назовем их основными разделительными секторами. Совокупность элементарных секторов, расположенных между парой основных разделительных секторов, образует распределительный сектор.
Условимся нумеровать все исходные точки по часовой стрелке, а секторы обозначать T(n1, n2), где n1 и n2 - номера точек на границах сектора, причем n1 < n2 для всех номеров, кроме последнего.
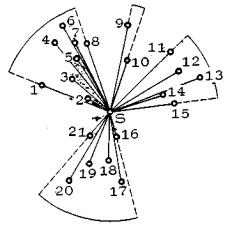
Рис. 19. Разбиение множества исходных точек на подмножества, образующие собирающие секторы; вспомогательный прием - проведение отрезков, соединяющих исходные точки с целевой точкой S (рабочих осей); границы собирающих секторов показаны пунктиром
На рис. 19 элементарными являются секторы Т(1, 2), Т(2, 3), Т(3, 4), ... , Т(21, 1), основными разделительными - секторы Т(21, 1) и Т(15, 16), распределительными - секторы Т(1, 15) и Т(16, 21). Очевидно, что проблема заключается в оптимальном вычислении из распределительных секторов собирающих секторов. Секторы, отделяющие один собирающий сектор от другого, назовем распределительными. На рис. 19 секторы Т(21, 1), Т(8, 9), T(10, 11), Т(15, 16) являются разделительными по отношению к собирающим секторам Т(1, 8), Т(9, 10), Т(11, 15), Т(16, 21). Если распределительный сектор по величине меньше 60°, то он, очевидно, сразу принимается в качестве собирающего. Таков, например, сектор Т(16, 21).
2.1.14. Во многих случаях способ выделения собирающих секторов в распределительном интуитивно очевиден, как это имеет место на рис. 19, но так бывает не всегда. Приведем некоторые полезные соображения, которые следует учитывать в более сложных случаях.
Пусть даны три исходные точки А1, А2, А3, лежащие на одинаковом расстоянии от целевой точки, причем точки А1 и А2 ближе друг к другу, чем точки А2 и А3 (рис. 20) и ÐA1SA2, ÐA2SA3 < 60° a ÐA1SA3 > 60°. Таким образом, все три точки не могут попасть в один собирающий сектор, и возникает дилемма: с какой из точек кооперировать точку А2. Ответ интуитивно очевиден: надо скооперировать А2 с А1.
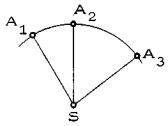
Рис. 20. Частный случай формирования собирающих секторов: точка А2 кооперируется с точкой А1, поскольку лежит к ней ближе, чем к А3
Справедливость его может быть строго доказана. Как следствие, получаем правило: чем ближе друг к другу точки (имеется в виду величина центрального угла между их рабочими осями), тем больше оснований для их включения в один собирающий сектор.
Из тех же соображений следует минимизировать суммарную величину всех собирающих секторов или, что то же самое, максимизировать суммарную величину разделительных секторов.
Итак, следует включать в один собирающий сектор точки, которые расположены плотнее друг к другу; выбрасывать из собирающих секторов те элементарные секторы, которые больше других по величине; стремиться свести к минимуму, с одной стороны, число собирающих секторов, с другой - величину каждого из них.
На рис. 21 приведен пример сети с одной целевой точкой. Сеть имеет структуру дерева с дихотомическим ветвлением в чистых узлах. Из целевой точки S выходят четыре конечных ребра (в общем случае их может быть и более семи), соответствующих четырем собирающим секторам. Построения в собирающих секторах ведутся независимо друг от друга в произвольном порядке.
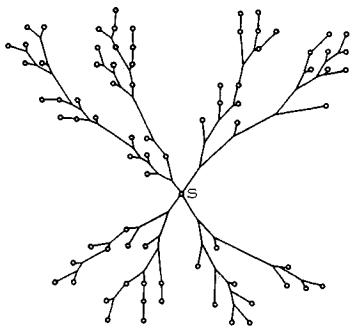
Рис. 21. Сеть с одной целевой точкой; при ее построении были выделены четыре собирающих сектора: соответственно сеть имеет четыре конечных нижних ребра
2.2. ЕСТЕСТВЕННО-ЖИЗНЕСПОСОБНАЯ СЕТЬ С ПРОИЗВОЛЬНЫМ ЧИСЛОМ ЦЕЛЕВЫХ ТОЧЕК
Общий подход к решению задачи
2.2.1. В настоящем разделе будет рассмотрена проблема построения оптимальной естественно-жизнеспособной сети с произвольным числом целевых и исходных точек, взаимное расположение которых также произвольно. Построение сети с одной целевой точкой было в предыдущем разделе сведено к построениям в собирающих секторах после распределения исходных точек по собирающим секторам, а построения в собирающем секторе сведены к последовательности двух элементарных операций, одна из которых представляет собой построение сети для двух исходных точек в соответствии с Центральной теоремой. Подобно этому решение задачи построения сети с произвольным числом целевых точек будет в существенной мере сведено к задаче построения сети с одной целевой точкой, но с использованием средств, ориентированных специально на эту задачу (аппарат стандартных полигонов).
2.2.2. В самых общих чертах схема построения естественно-жизнеспособной сети с произвольным числом целевых точек такова. Независимо друг от друга строятся сети, связывающие каждую из целевых точек с исходными точками ее ареала (решается задача раздела 2.1). Затем осуществляется пространственное совмещение (наложение) построенных сетей. В полученной таким образом сети производятся преобразования, цель которых - удаление всего лишнего, упрощение и сокращение длины сети путем кооперирования ранее независимых маршрутов (используется аппарат стандартных полигонов).
2.2.3. Сеть, построенная к одной целевой точке от исходных точек ее ареала влияния, называется независимой.
Сеть, полученную в результате совмещения на одном чертеже (взаимного наложения) двух или более независимых сетей, будем называть суммарной. Процедура объединения независимых сетей в оптимальную естественно-жизнеспособную сеть называется кооперированием независимых сетей, а сама оптимальная сеть как результат кооперирования - интегральной сетью.
Пусть задано некоторое множество исходных и целевых точек. Будем называть полигоном минимальный выпуклый многоугольник, содержащий все рассматриваемые точки. В ряде случаев взаиморасположение исходных и целевых точек в полигоне таково, что позволяет существенно алгоритмизировать построение оптимальной естественно-жизнеспособной сети. Полигоны, обладающие такого рода особенностями, называются стандартными. Рассмотрение процедур построения сети в стандартных полигонах дает ключ к решению весьма сложной общей задачи построения сети с произвольным числом целевых точек.
При рассмотрении стандартных полигонов нам понадобится еще одно понятие теории графов. Двудольным графом называется граф, множество вершин которого можно разбить на два подмножества таким образом, что каждое ребро графа соединяет вершины из разных подмножеств. На рис. 22а приведен пример двудольного графа. Множество {1, 2, 3, 4, 5, 6} вершин графа разбито на два подмножества {1, 2, 3} и {4, 5, 6} таким образом, что каждое ребро графа соединяет вершины из разных подмножеств. В частном случае, если каждая вершина одного из подмножеств соединена ребром с каждой из вершин другого подмножества (рис. 22б), граф называется полным двудольным.
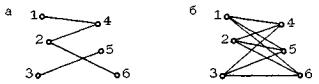
Рис. 22. Примеры двудольного графа: а - неполный, б - полный. Вершины 1, 2, 3 образуют одно подмножество, вершины 4, 5, 6 - другое
Основные типы стандартных полигонов х)
х) Ограниченный объем данного издания позволяет нам рассмотреть аппарат стандартных полигонов лишь в самом сжатом виде.
2.2.4. Пусть граф существенных связей точек некоторого полигона представляет собой полный двудольный граф, одно из подмножеств вершин которого образуют целевые точки (число целевых точек не менее двух), а другое - исходные точки. Это означает, что ареалы влияния целевых точек совпадают, распространяясь на все исходные точки, но сами целевые точки не входят в ареалы друг друга. Пусть, кроме того, вершины графа расположены таким образом, что существует прямая MN, разделяющая на плоскости оба подмножества графа, т.е. подмножество S целевых точек лежит в одной полуплоскости, а подмножество А исходных точек - в другой (рис, 23а).
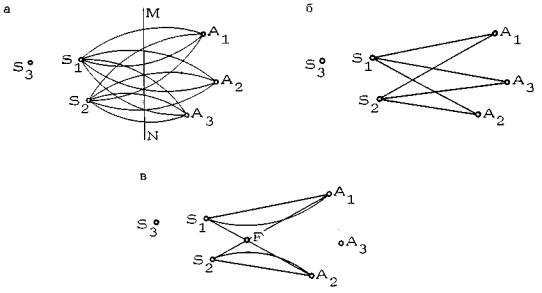
Рис. 23. К определению полигонов типа А и В: а - в полигонах типа А и В существует прямая MN, разделяющая множество исходных {А1, А2, А3} и целевых {S1, S2, S3}точек (на рисунке показаны пустые рабочие поля); б - рабочие оси пустых рабочих полей; S1A1 и S2А3 - главные оси полигона (не пересекаются с другими осями); в – S1, S2, А1, А2 - крайние точки полигона, F - фокус, D┘(S1, А1) и D└(S2, A2) - главные дуги полигона
Построим все рабочие поля (от каждой из целевых точек ко всем исходным) и выберем среди них множество пустых рабочих полей, т.е. полей, которые не содержат других заданных точек. В нашем примере это R(S1, A1), R(S1, A2), R(S1, A3), R(S2, A1), R(S2, A2), R(s2, A3). Среди рабочих осей этих полей найдутся не более чем две такие, которые не пересекаются с другими рабочими осями. Они называются главными осями полигона, а соответствующие рабочие поля - главными полями. В нашем случае главные оси - S1A1 и S2A2, (рис. 23б). Точки, лежащие на концах главных осей полигона, называются крайними точками полигона. В общем случае число крайних точек, очевидно, равно четырем. Однако возможны вырожденные случаи, когда крайних точек три или даже две (если главная ось полигона одна).
Рассмотрим четырехугольник, вершинами которого являются крайние точки, а двумя сторонами - главные оси. Точку пересечения его диагоналей назовем фокусом и обозначим F (рис. 23в). Рабочие дуги, соответствующие главным осям полигона и обращенные выпуклостью друг к другу, назовем главными дугами полигона. В нашем случае D┘(S1, A1) и D└(S2, A2) - главные дуги.
2.2.5. Существенно важен вопрос, пересекаются ли главные дуги полигона. Если главные дуги пересекаются или касаются, то такой полигон называется полигоном типа А. Если же главные дуги полигона не имеют ни одной общей точки, то такой полигой называется полигоном типа В. Общим для полигонов типов А и В являются два условия:
1) граф существенных связей представляет собой полный двудольный граф;
2) существует прямая MN , разделяющая подмножества вершин двудольного графа.
На рис. 24а приведен пример полигона типа А, а на рис. 24б пример полигона типа В. Показаны главные дуги, диагонали и фокусы полигонов.

Рис. 24. Полигоны типа А и В: а - в полигоне типа А главные дуги пересекаются; б - в полигоне типа В главные дуги не пересекаются
Полигоны типа А
2.2.6. Опорной лункой полигона типа А называется рабочая лунка, принадлежащая одновременно всем рабочим полям полигона. Опорная лунка имеет две вершины, одна из которых обращена к множеству S целевых точек, а другая - к множеству А исходных точек. Обозначим первую вершину S0, а вторую А0 (рис. 25а).

Рис. 25. Построение сети в полигоне типа А: а - первая фаза построения: показаны главные дуги полигона и диаметр S0А0 опорной лунки; задача сводится к построениям в двух собирающих секторах (первый - с вершиной S0 и множеством вершин А, второй - с вершиной A0 и множеством вершин S); б - построенная сеть
Заметим, что ситуация, в известном смысле, симметрична относительно двух
подмножеств вершин графа, так что любое из этих подмножеств можно рассматривать
как множество целевых точек, а другое - как множество исходных точек,
независимо от обозначения. Диаметр S0А0 опорной лунки принадлежит всем рабочим
полям одновременно и может быть использован для маршрутов из любой целевой
точки в любую исходную. Точка S0
может при этом рассматриваться как единственная целевая точка, в которую
необходимо прийти из исходных точек множества А, и построения ведутся так же,
как в собирающем секторе с вершиной в точке S0, охватывающем множество А и имеющем опорное ребро S0А0.
Отличие от обычного собирающего сектора состоит лишь в том, что в качестве
опорных дуг рассматриваются не рабочие дуги D┘(S0, A1) D└(S0, A4),
а дуги ![]() и
и
![]() , представляющие собой части рабочих дуг D┘(S2, A1)
и D└(S3, A4).
, представляющие собой части рабочих дуг D┘(S2, A1)
и D└(S3, A4).
Аналогично, в силу симметрии ситуации, точка А0 может рассматриваться как единственная целевая точка множества точек S, которые лежат в собирающем секторе с вершиной в А0 и опорным ребром A0S0.
Таким образом, в полигоне типа А задача сводится, с учетом сделанной оговорки, к известной уже задаче о построении сети в собирающем секторе, решаемой дважды: сначала в качестве целевой точки рассматривается вершина S0 опорного ребра, а в качестве исходных - точки множества А, затем в качестве целевой точки рассматривается вершина А0 опорного ребра, а в качестве исходных - точки множества S. Если точки расположены так, как это показано на рис. 25а, то сеть имеет вид, представленный на рис. 25б.
Полигоны типа В
2.2.7. Прежде всего рассмотрим простейший частный случай В -полигона, полагая, что в нем всего четыре точки: две целевые и две исходные. Очевидно, что все они являются крайними точками полигона. Такой полигон будем называть элементарным В -полигоном (рис. 26а).
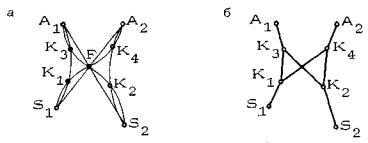
Рис. 26. Построение сети в элементарном полигоне типа В: а - использование фокуса для построения узлов K1, K2, K3, K4; б - построенная сеть (ребра K1K4 и K2K3 образуют простую связку)
Построения в элементарном полигоне типа В ведутся следующим образом. Строим рабочие дуги, связывающие фокус полигона F с крайними точками D└(F, А1), D┘(F, А2), D└(F, S2), D┘(F, S1) и фиксируем точки их пересечения K1, K2, K3, K4 с главными дугами. Рассматривая найденные точки как узлы сети, строим саму сеть (рис. 26б).
2.2.8. Обратим внимание на характерную пару скрещивающихся ребер K1K4, и K2K3. Одно из ребер используется на маршрутах м(S2, A1) и м(A1, S2), а второе на маршрутах м(S1, A2) и м(A2, S1), т.е. оба они используются на диагональных маршрутах.
Эти ребра позволяют перейти с одной главной дуги полигона на другую, связывают эти дуги. Такая пара ребер называется простой связкой рабочих дуг D┘(S1, A1) и D└(S2, A2). Простая связка всегда располагается в окрестности наибольшего сближения главных дуг, так что точка пересечения ребер простой связки расположена вблизи прямой, соединяющей центры главных дуг. Как правило, она близка также к фокусу полигона.
Простую связку, все четыре узла которой являются чистыми узлами, называют невырожденной, а связку, в которой хотя бы один узел является смешанным, - вырожденной. Пример элементарного B - полигона с вырожденной связкой приведен на рис. 27. Поскольку рабочая дуга D└(S2, A2) не пересекается с главной дугой D└(S2, A2), то узел K4 совпадает с исходной точкой A2.
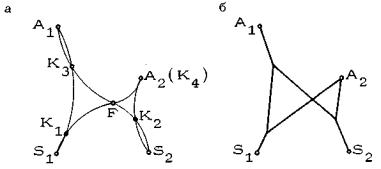
Рис. 27. Пример элементарного полигона типа B с вырожденной простой связкой: а - отыскание узлов; б- построенная сеть
2.2.9. B-полигон, в котором хотя бы одно из подмножеств заданных точек (исходных или целевых) содержит более двух точек, будем называть неэлементарным. На рис. 28 представлен пример сети в неэлементарном B-полигоне.
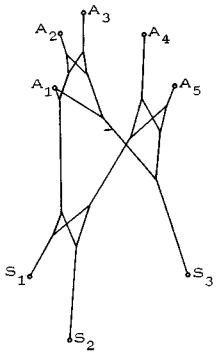
Рис. 28. Более сложный пример полигона типа B (построенная сеть)
2.2.10. По поводу конфигурации сети в полигонах типа A и B можно высказать замечания, имеющие общий характер, т.е. относящиеся также к сети в произвольном полигоне:
1) никакие два ребра не сходятся под углом, меньшим 30° (для интегральной сети);
2) точки пересечения скрещивающихся ребер мы не будем относить к категории узлов, поскольку в них не происходит слияния или разделения маршрутов передвижения по сети. Каждый чистый узел сети характеризуется тем, что любые два его ребра лежат по разные стороны от продолжения третьего.
Общий случай сети с произвольным числом целевых точек
2.2.11. Рассмотренные нами полигоны типа A, B представляют собой наиболее простые случаи взаимного расположения исходных и целевых точек. Основной смысл изучения этих частных случаев заключается в том, что построение интегральной сети в общем случае может быть в значительной мере сведено к последовательности построений в выделяемых стандартных полигонах.
Пусть, например, задано множество точек, представленное на рис. 29а. Точки 10 и 11 - целевые. В ареал влияния каждой из них входят все исходные точки и другая целевая. В данном полигоне легко выделить три простых полигона типа B: P1 = (10, 11, 1, 2, 3), P2 = (10, 11, 4, 5, 6), P3 = (10, 11, 7, 8, 9). Связь между целевыми точками 10 и 11 может быть учтена при построении сети в полигоне P2. Конфигурация сети, представляющей собой суперпозицию сетей в полигонах P1, P2, P3, представлена на рис. 29б. Она же является окончательной.
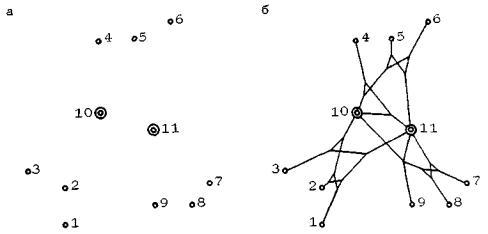
Рис. 29. Пример построения сети с двумя целевыми точками: а - заданное размещение точек; точки 10 и 11 - целевые; задача сводится к построениям в трех полигонах типа B: во всех трех случаях одно подмножество образуют целевые точки 10 и 11, а второе - точки (1, 2, 3), (4, 5, 6), (7, 8, 9) соответственно; б - построенная сеть
2.2.12. В некоторых случаях удобно разбить множество целевых точек на группы, для каждой из которых построить свою интегральную сеть (такую сеть будем называть групповой), осуществить суперпозицию групповых сетей, а затем интегрирование полученной сети.
Пусть, например, заданные точки расположены так, как это показано на рис. 30 (целевые точки обозначены двойным кружком и пронумерованы). Предположим, что в ареал влияния каждой целевой точки входят все заданные исходные точки. В данном случае удобно разбить множество целевых точек на группы (1, 2, 3, 4), (5, 6), (7, 8, 9) и (10, 11). Каждая из выделенных групп образует вместе со множеством исходных точек полигон типа B. После построения групповых сетей удобно произвести их попарное кооперирование: сети (1, 2, 3, 4) с сетью (7, 8, 9), а сети (5, 6) с сетью (10, 11), и лишь после этого переходить непосредственно к синтезу интегральной сети из построенных двух групповых сетей (1, 2, 3, 4, 5, 7, 8, 9) и (5, 6, 10, 11).
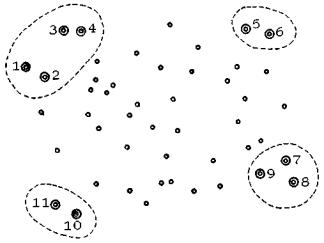
Рис. 30. Пример размещения заданных точек, в котором удобно в качестве промежуточного этапа строить групповые сети (пунктирными линиями выделены четыре группы целевых точек)
2.3. ВЛИЯНИЕ НА ПОСТРОЕНИЕ ПЕШЕХОДНЫХ СЕТЕЙ СУЩЕСТВУЮЩЕЙ СЕТИ И ПРЕПЯТСТВИЙ
Задача реконструкции существующей сети
2.3.1. Под реконструкцией существующей сети понимается следующее. Пусть имеется какая-либо заданная пешеходная сеть или сеть автомобильных проездов (в той мере, в какой она может быть использована для движения пешеходов), не удовлетворяющая хотя бы частично условию естественной жизнеспособности. Требуется превратить ее в комфортную пешеходную сеть путем добавления новых участков минимальной суммарной длины (следовательно, и стоимости).
Эта проблема возникает в процессе проектирования в тех случаях, когда сеть проездов проектируется раньше, чем сеть пешеходных путей, а также в процессе функционирования жилого комплекса, когда пешеходная сеть оказывается существенно нежизнеспособной либо из-за ошибок, допущенных при проектировании, либо в связи с теми или иными изменениями в ситуации (например, в связи с изменениями в размещении остановок общественного транспорта).
2.3.2. Наиболее часто встречающейся задачей реконструкции является построение оптимальной естественно-жизнеспособной сети с одной или несколькими целевыми точками при наличии существующей прямолинейной трассы. Дадим краткий набросок подхода к решению этой задачи.
Пусть дана прямолинейная бесконечная трасса N1N2, целевая точка S, лежащая на трассе, и исходная точка A вне ее (рис. 31). Для присоединения, точки A к трассе достаточно построить рабочую дугу D(S, A) и на ее пересечении с трассой (если такое пересечение имеет место) зафиксировать точку K. Участок AK - искомый участок присоединения к трассе. Комфортность маршрутов м(S, A) и м(A, S) и оптимальность решения очевидны. Легко видеть также, что участок AK наклонен к трассе под углом 30°.
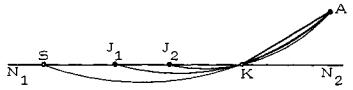
Рис. 31. Простейший пример: N1N2 - существующая прямолинейная трасса; S - целевая точка на трассе; А - исходная точка, присоединяемая к трассе отрезком AK, наклоненным по отношению к ней под углом 30°; точка K строится с использованием рабочей дуги D└(S, А)
Для того чтобы рабочая дуга D(S, A) пересекалась с трассой, необходимо, чтобы рабочая ось SA была наклонена к трассе под углом, меньшим 30°.
2.3.3. Проведем через точку S прямые Р1Р4 и Р2Р3, наклоненные под углом 30° к трассе (рис. 32). Секторы P1SN1, P2SN2, P3SN1, P4SN2 называются секторами реконструкции на прямой, а лучи SP1, SP2, SP3 и SP4 - границами этих секторов. Будем говорить, что точка А может быть привязана, если существует естественно-жизнеспособный маршрут, связывающий точку А с точкой S, такой, что хотя бы часть его проходит по трассе. Для этого необходимо, чтобы некоторый отрезок трассы принадлежал рабочему полю r(S, A). Ясно, что это условие выполнено для точек, принадлежащих секторам реконструкции (кроме их границ) и не выполнено для всех остальных точек. Следовательно, любая точка, лежащая строго внутри поля реконструкции, может быть привязана к трассе.
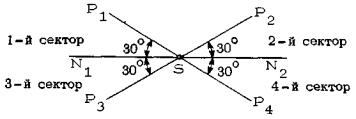
Рис. 32. Сектор реконструкций - удобный инструмент решения задачи: точки, лежащие в секторах реконструкции, присоединяются к трассе, а точки, лежащие вне их, к трассе не присоединяются
Заведомо не имеют отношения к трассе точки, лежащие вне секторов реконструкции. Что касается точек, принадлежащих секторам реконструкции, то в общем случае часть из них выгодно присоединить к трассе, а остальные скооперировать с точками, лежащими вне полей реконструкции.
На рис. 33 приведен пример построения сети с одной целевой точкой, лежащей на трассе.
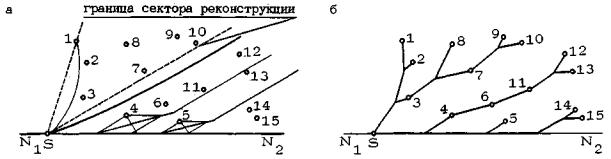
Рис. 33. Пример реконструкции трассы при наличии одной целевой и 15 исходных точек: а - заданная ситуация и вспомогательные построения; точки 1, 2, 3, 7, 8, 9, 10 лежат вне сектора реконструкции, образуя самостоятельный собирающий сектор; остальные точки лежат в секторе реконструкции и присоединяются к трассе тремя ветвями; б - построенная сеть
2.3.4. В том случае, когда на трассе размещается не одна, а несколько целевых точек, новых проблем не возникает, и общая последовательность действий та же, что и при построении сети с несколькими целевыми точками без реконструкции (раздел 2.2) : строятся независимые сети каждой из целевых точек в отдельности, затем осуществляется суперпозиция независимых сетей в том порядке, который окажется удобным, выделяются стандартные полигоны и производится последовательное интегрирование сети.
Задача обхода препятствий
2.3.5. Задача обхода препятствий возникает в связи с тем, что реальная территория жилого комплекса всегда содержит разного рода объекты, представляющие собой преграды на пути пешеходного движения, которые более или менее существенно ограничивают возможности в выборе направлений строящейся пешеходной сети. Внутри межмагистральных территорий типичными препятствиями, которые вынуждена обходить пешеходная сеть, являются габариты различных зданий, участки детских дошкольных учреждений, школ, предприятий сферы услуг, административных учреждений, а в масштабе планировочного района - огороженные территории парков, стадионов, промышленных предприятий, научных учреждений, магистральные улицы, полосы отвода железных дорог, реки и т.д.
2.3.6. До тех пор пока мы рассматривали построение пешеходной сети при отсутствии препятствий, мы могли накладывать на конфигурацию сети условие естественной жизнеспособности, так что во всех предшествующих задачах это условие было основным. Однако сеть, обходящая препятствия, не может, вообще говоря, отвечать этому условию. Именно в связи с этим мы ввели в разделе 1.2 понятие естественной жизнеспособности в отличие от более общего понятия жизнеспособности, относимого к сети, в которой некоторые маршруты заведомо не могут быть естественно-жизнеспособными. На такие маршруты и участки сети, реализующие эти маршруты, будем налагать условие искусственной жизнеспособности.
2.3.7. Основной вопрос при обходе препятствий - это вопрос выбора направлений обхода. При сравнении конкурирующих вариантов обхода необходимо "определить, какой из них предпочтительнее с точки зрения пешехода, т.е. является в силу этого жизнеспособным.
На искусственно-жизнеспособных маршрутах препятствия в большинстве случаев загораживают от пешехода целевую точку. Однако, как показали натурные исследования, пешеход практически всегда с высокой степенью точности представляет себе направление на цель (разумеется, при условии, что он движется к этой цели не впервые).
2.3.8. В качестве препятствий удобно рассматривать границы объектов, через которые трассировка пешеходной сети невозможна: внешние габариты зданий, ограды участков, берега рек и т.д. Мы будем представлять их как некоторые ломаные линии, заменяя в необходимых случаях кривые приближениями с помощью ломаных линий. Ломаные могут быть, в частности, замкнутыми (например, габариты зданий) и содержать одну или несколько выколотых точек (например, ограды участков различных учреждений, входы на которые рассматриваются как выколотые точки).
В дальнейшем будем использовать введенное в разделе 2.2 понятие полигона.
Любые две связуемые точки полигона будем называть взаимно открытым и (или открытыми друг по отношению к другу), если соединяющий их отрезок не пересекает препятствия. В противном случае будем называть их взаимно закрытыми. На рис. 34 точки 1, 2, 3 являются закрытыми по отношению к точке 5, выколотой в препятствии, а точки 4, 6 - открытыми от отношению к ней.
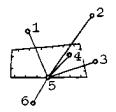
Рис. 34. Открытые и закрытые точки: препятствие - ограда участка (показана сплошной линией с поперечными черточками); точка 5 (вход на участок) выколота в препятствии; точки 1, 2, 3 закрыты по отношению к точке 5, точки 4, 6 - открыты
2.3.9. Пусть заданы две взаимно закрытые точки: целевая точка S и исходная точка А, а препятствие представляет собой замкнутую ломаную Q (рис. 35). Выберем предпочтительное направление обхода препятствия: вправо по отношению к рабочей оси, если смотреть из исходной точки. Обозначим через Q' ту часть ломаной Q, которая отсекается рабочей осью и лежит по отношению к ней со стороны обхода. Рассмотрим полигон Р', включающий заданные точки А и S и точки ломаной Q'. Его граница представляет собой выпуклую ломаную. Выберем в достаточно малой окрестности этих вершин вне полигона Р' по одной точке так, чтобы любые две выбранные точки, соответствующие смежным вершинам ломаной, были взаимно открытыми. Найденные таким образом точки называются подставными. На рис. 35 подставные точки обозначены K1, K2, K3, K4. Ломаная АK1K2K3K4S представляет собой кратчайший жизнеспособный маршрут из точки А в точку S (трассировка участков K1K2 и K3K4 маршрута непосредственно на границе полигона Р' невозможна, поскольку никакой маршрут не может включать принадлежащие препятствию точки). В данном случае она не является одновременно и кратчайшей жизнеспособной сетью, связывающей точку А с точкой S.
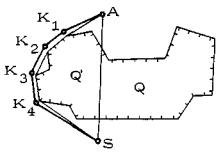
Рис. 35. Задачи, связанные с обходом препятствий: выбор направления обхода и построение кратчайшего жизнеспособного маршрута из точки А в точку S; точки K1, K2, K3, K4 - подставные
2.3.10. При одной исходной и одной целевой точках кратчайшая жизнеспособная сеть совпадает по трассировке с кратчайшим жизнеспособным маршрутом между этими точками точно так же, как при построении естественно-жизнеспособной сети. В этом случае - задача построения сети сводится к построению маршрута. При наличии нескольких исходных точек задача построения кратчайшей жизнеспособной сети становится самостоятельной. Ее решение начинается с построения кратчайших маршрутов от исходных точек к целевой.
Пусть, например, заданы две исходные точки А1, А2, закрытые по отношению к целевой точке S препятствием Q (рис. 36а). Построим кратчайшие жизнеспособные маршруты м(А1, S) и м(A2, S), обозначив подставные точки K1 и K2. Рассматривая точку K1 как промежуточную целевую, мы можем скооперировать участки А1K1, и А2K1, поскольку точки А1 и А2 лежат в пределах собирающего сектора относительно точки K1. В результате получаем естественно-жизнеспособный относительно подставной точки K1 фрагмент сети в собирающем секторе. Остается достроить сеть, включив в нее участки K1K2 и K2S (рис. 36б),
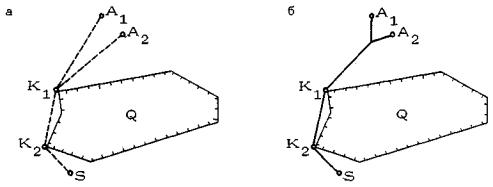
Рис. 36. Простейший пример построения сети, обходящей препятствия (одна целевая и две исходных точки): а - первая фаза - построение кратчайших маршрутов (показаны пунктиром); б - построенная сеть: в точках K2 и K1 сеть огибает препятствия; естественно-жизнеспособный фрагмент, связывающий точки А1 и А2 с подставной точкой K1, строится так, как если бы точка K1 была целевой
2.3.11. Рассмотрим более сложный пример. Пусть задано препятствие Q, целевая точка S и исходные точки А1, А2, ..., А22, причем точка А22 выколота в препятствии, а точки A16, А17, ..., А21 находятся в пределах многоугольника Q (рис. 37).
Точки А7, А8, ..., А21 являются закрытыми по отношению к целевой.
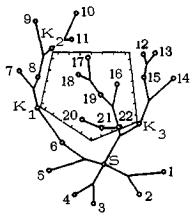
Рис. 37. Более сложный пример сети, обходящей препятствие: сеть состоит из естественно-жизнеспособных фрагментов, связанных между собой через подставные точки K1, K2, K3 и точку А22, выколотую в препятствии; S - целевая точка; исходные точки обозначены своими номерами
Построим для каждой из этих закрытых точек кратчайший жизнеспособный маршрут (эти маршруты на чертеже опущены) и зафиксируем - множество подставных точек K1, K2, K3. Точку А22 также можно рассматривать как подставную. Будем называть ареалом влияния подставной точки K множество исходных и подставных точек, маршруты движения из которых в целевую проходят через точку K.
Рассмотрим множество исходных и подставных точек, открытых по отношению к S: {А1, А2, ..., A6, А22, K1, K3}. Построим естественно-жизнеспособную сеть, связывающую эти точки с точкой S. После этого в качестве целевых точек рассмотрим поочередно все подставные точки, открытые по отношению к S и уже присоединенные к сети: точки K1, K3 и А22. Начнем, например, с точки K1. Из множества точек {А7, A8, ..., А11, K2}, входящих в ареал ее влияния, выделим множество точек {А7, A8, A9, K2}, открытых по отношению к ней, и построим оптимальную естественно-жизнеспособную сеть, связывающую эти точки с K1. Таким образом, построено уже два комфортных фрагмента будущей сети, связанных друг с другом через подставную точку K1. Среди верхних конечных ребер второго фрагмента сети есть ребро, выходящее из подставной точки K2. В ареал влияния K2 входят две исходные точки А10 и А11, открытые по отношению к ней. Строим оптимальную сеть, связывающую эти точки с K2. Итак, все точки, входящие в ареал влияния подставной точки K1 присоединены к сети.
Перейдем к подставной точке А22. Исходные точки А16, А17, ... , А21, входящие в ареал ее влияния, открыты по отношению к ней. Строим сеть, связывающую эти точки с А22. Это еще один естественно-жизнеспособный фрагмент строящейся сети.
Остается подставная точка K3. В ареал ее влияния входят исходные точки А12, А13, А14, А15, открытые по отношению к ней. Строим сеть, связывающую эти точки с K3.
Нетрудно видать, что число естественно-жизнеспособных фрагментов построенной сети равно n + 1, если n - число подставных точек ((n + 1)-й фрагмент соответствует целевой точке S).
Описанная процедура может быть применена к построению независимых сетей в самых разнообразных ситуациях, в том числе и при наличии существующей сети: при построении естественно-жизнеспособных фрагментов решается, в частности, и задача реконструкции сети.
2.4. ДОПОЛНИТЕЛЬНЫЕ ВОПРОСЫ
Сопряжения участков сети
2.4.1. В предыдущих разделах конфигурация пешеходной сети представлялась таким образом, что любой маршрут по сети был ломаной линией. Это было естественным результатом оптимизации сети по критерию суммарной длины. Однако резкое изменение направления движения при переходе с одного участка сети на другой неприемлемо по двум причинам. Во-первых, с точки зрения психологического комфорта движения, поскольку при этом возникает резкий переход от одного значения контрольного угла к другому, во-вторых, с чисто физической точки зрения, поскольку любое тело стремится двигаться по инерции из любой точки K в том же направлении, в каком оно в нее прибыло.
Радиус сопряжения участков принимается из физических соображений равным 5 м. Таким образом, после того как будет построена кратчайшая жизнеспособная сеть, мы должны проследить маршруты движения по ней и на каждом из них выполнить сопряжения соседних участков радиусом, равным 5 м.
Расчет потоков
2.4.2. Целью расчета потоков пешеходов является установление для всех участков пешеходной сети сечений, обеспечивающих пропуск идущих по ним потоков. Величина потоков в обоих направлениях через любой участок сети колеблется на протяжении дня, а также в зависимости от дня недели и ряда других факторов. Задача состоит в нахождении такого распределения потоков через участок сети в обоих направлениях в некоторый промежуток времени, которое требует для своего пропуска максимального значения участка.
Расчет потоков на пешеходной сети с несколькими целевыми точками состоит из следующих основных этапов: построение экстрагированной сети для каждой целевой точки; расчет потоков на экстрагированных сетях (простых потоков); суммирование простых потоков на участках интегральной сети.
Построение экстрагированной целевой точки представляет собой восстановление на интегральной сети путей, ведущих из данной целевой точки в исходные точки ее ареала (в расчетах на транспортных сетях аналогичная задача называется построением деревьев кратчайших путей). Конфигурация эстрагированной сети близка к конфигурации независимой сети, ранее построенной в процессе формирования интегральной сети. Рассмотрение вопросов собственно расчета потоков на участках экстрагированных сетей и интегральной сети выходит за рамки настоящих методических рекомендаций.
Расчет сечений
2.4.3. Установив для каждого участка сети расчетные величины потоков в обоих направлениях, можно перейти к расчету сечений участков. Пропускная способность одной полосы движения пешеходов при однородном потоке (например, трудовом), средней скорости движения 4 км/ч и среднем расстоянии между пешеходами в потоке 3 м равна 1300 чел./ч. Для неоднородных потоков пропускная способность полосы может быть принята 1000 чел./ч. Ширина одной полосы движения может быть принята равной 80 см. Сечения шириной в одну полосу движения можно применять лишь в исключительных случаях, на коротком участке сети (5 - 10 м длины), когда вероятность одновременного движения двух пешеходов по участку достаточно мала. Как правило, минимальное сечение участка следует принимать не менее чем в две полосы движения, даже если одна полоса в состоянии пропустить суммарный поток в обоих направлениях.
3. ПОСТРОЕНИЕ ПЕШЕХОДНЫХ СЕТЕЙ В ОБЩЕМ СЛУЧАЕ
В разделе 2 проблема построения пешеходных сетей рассматривалась для упрощенных частных случаев в порядке усложнения: от одной целевой и двух исходных точек при отсутствии существующей сети и препятствий до произвольного числа и произвольного размещения целевых и исходных точек с учетом влияния существующей сети и препятствий.
В настоящем разделе проблема рассматривается во всей ее сложности на сквозном реальном примере (квартал № 10 Химки-Ховрино в Москве). Здесь на первый план выступают такие вопросы, как трактовка планировочной ситуации в терминах математической модели пешеходных сетей, выделение исходных и целевых точек, определение общей последовательности построения сети (независимые сети целевых точек, групповые сети, интегральная сеть), а для каждой целевой точки - общая последовательность построения независимой сети.
Кроме того, рассматривается взаимосвязь пешеходных сетей с другими подсистемами в процессе проектирования различных планировочных объектов на различных проектных стадиях (ПДП, проект застройки, проект благоустройства). При анализе взаимодействия в проектном процессе пешеходных сетей с системой озеленения и благоустройства, жилой застройкой, системой объектов обслуживания населения и системой транспорта обсуждаются также вопросы регулирования плотности пешеходной сети, корректировки ее конфигурации из дополнительных планировочных соображений, вопросы безопасности движения, учета эстетических требований и др.
3.1. КОНСТРУИРОВАНИЕ ПЕШЕХОДНОЙ СЕТИ ПРИ ФИКСИРОВАННОМ РАЗМЕЩЕНИИ СВЯЗУЕМЫХ ОБЪЕКТОВ
3.1.1. В качестве конкретного планировочного объекта, на примере которого рассматривается процедура построения пешеходной сети, выбран квартал № 10 района Химки-Ховрино в Москве. Здесь приведены материалы реальной проектной работы, проведенной автором совместно с мастерской № 2 управления "Моспроект-1" (главный архитектор проекта Т.И. Вольфтруб). Выбор именно этого квартала определяется тем, что в нем, по ряду обстоятельств, проектирование внешнего благоустройства было начато в тот момент, когда вся застройка и система автомобильных проездов были зафиксированы и практически целиком выполнены в натуре. Благодаря этому представлялась довольно редкая возможность решения чисто сетевой задачи при фиксированной застройке. Исходная ситуация, представляющая собой застройку квартала с сетью автомобильных проездов, показана на рис. 38.
Подготовка исходной информации
3.1.2. Исходная информация для построения пешеходной сети задана, если задано множество целевых точек с исходными точками, входящими в ареалы их влияния, существующая система дорог и проездов с твердым покрытием, а также система препятствий.
Любое здание выступает одновременно в двух качествах: с одной стороны, его габарит на уровне земли представляет собой препятствие для пешеходного движения, с другой - каждый его вход должен рассматриваться как заданная точка, корреспонидирующая с другими заданными точками. В жилом комплексе с застройкой традиционного типа (имеются в виду дома, где на один подъезд приходится не более 500 жит.) в качестве исходных точек можно рассматривать входы в жилые дома, а в качестве целевых точек - места приложения труда, учреждения обслуживания и остановки общественного транспорта.
3.1.3. При проектировании пешеходной сети конкретного жилого комплекса (например, микрорайона) необходимо учитывать не только внутренние, связи, т.е. связи между объектами, расположенными в границах данного жилого комплекса (внутренними объектами), но и внешние, т.е. связи - внутренних объектов с внешними, а также те связи между внешними объектами, которые могут быть реализованы транзитными пешеходными путями через рассматриваемую территорию.
Анализ внешних связей может ограничиваться объектами, удаленными от данного жилого комплекса не более чем на 1 - 2 км, т.е. на расстояние, в пределах которого значительная часть передвижений осуществляется пешком, а также парами внешних объектов, такими, что внутрь рабочего поля, построенного между ними, попадает хотя бы часть рассматриваемой территории.
Анализ внутренних и внешних связей квартала № 10 Химки-Ховрино завершается установлением внутренних и внешних целевых точек с их ареалами. Целевые точки, являющиеся фокусами тяготения и источниками потоков пешеходов, будем называть конечно-целевыми точками. Целевые точки, не являющиеся сами по себе фокусами тяготения и источниками потоков, будем называть транзитно-целевыми. Целевыми точками, относящимися к числу транзитно-целевых, являются например, места перехода через транспортные магистрали (заданные заранее или определяемые при построении сети), а также специально назначаемые точки, лежащие на границах рассматриваемой территории, через которые направляются пешеходные потоки к внешним целевым точкам. Все внутренние целевые точки (в том числе и транзитные) фиксируются на плане и нумеруются. Для каждой транзитной точки составляется также перечень целевых точек, с которыми осуществляется связь через данную транзитную.
На рис. 38 целевые точки квартала № 10 Химки-Ховрино обозначены буквой S с индексом. Точки S1, S6, S18, S25 - транзитные по направлениям к станции метро "Водный стадион", к предприятию, к районному центру и к парку "Дружба" соответственно. В ареалы влияния всех целевых точек, кроме детских садов и остановок автобусов, входят все жилые дома квартала и сами целевые точки.
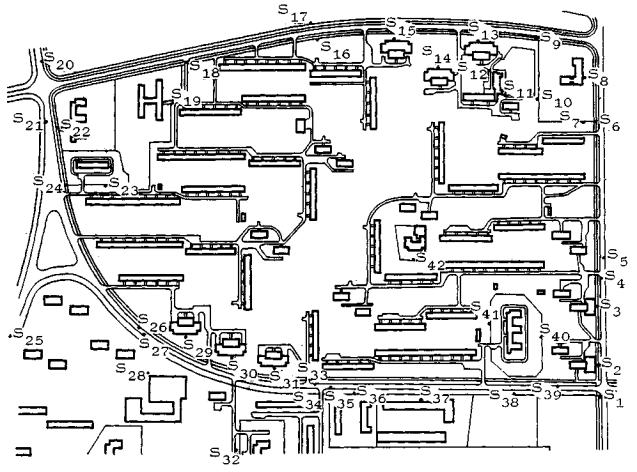
Целевые точки: S1 - транзитная к станции метро "Водный стадион", объекту приложения труда, водноспортивному стадиону "Динамо" и др.; S2,S3 - комбинат бытового обслуживания, столовая: S6, S9 - транзитные к объектам приложения труда, Головинским прудам и др.; S18, S24 - транзитные к районному центру, рынку и др.; S25 - транзитная к парку "Дружба", к станции метро "Речной вокзал", Химкинскому речному вокзалу, кинотеатру "Нева", универмагу "Ленинград" и др.; S26 - торговый центр квартала № 4; S37, S38 - объекты приложения труда. Остальные целевые точки - входы на участки школ и 38 детских учреждений, внутриквартальные объекты системы обслуживания, остановки автобусов
Рис. 38. Квартал №10 района Химки-Ховрино. Проектная ситуация
На плане квартала показана система автомобильных проездов и пешеходных тротуаров вдоль улиц, которая может быть использована (по крайней мере частично) для пешеходного движения. Она учитывается в рамках решения задачи реконструкции при построении естественно-жизнеспособных фрагментов конструируемой пешеходной сети. К препятствиям относятся габариты зданий и ограды участков школ и детских садов. В число целевых точек входят точки S7, S10, S11, S12, S19, S22, S23, S40, S41, S42, выколотые в препятствиях - оградах участков школ и детских садов.
Конструирование сети
3.1.4. Процедуру построения пешеходной сети можно расчленить на два этапа: построение независимых сетей целевых точек и последовательное интегрирование независимых сетей (построение интегральной сети). Порядок перебора целевых точек для построения независимых сетей совершенно произволен и определяется лишь соображениями удобства.
3.1.5. При практическом построении независимых сетей бывает удобно несколько модифицировать формальные процедуры, описанные в разделе 2. Так, например, построение кратчайших маршрутов с обходом препятствий в рассматриваемую целевую точку из исходных точек ее ареала (раздел 2.3) можно вести в неявной форме, фиксируя на плане только подставные точки. Не обязательно сначала определять все подставные точки и лишь затем переходить к построению естественно-жизнеспособных фрагментов: при наличии сложной системы препятствий проще определить сначала только группу подставных точек вблизи целевой точки и построить соответствующие естественно-жизнеспособные фрагменты, затем определить новую группу подставных точек, более удаленную от основной целевой точки, и построить соответствующие фрагменты и т.д. Таким образом, вместо поочередного построения отдельных ветвей лучше вести построение единым расширяющимся фронтом, подключая к сети на каждом шаге группы точек единого порядка удаленности от целевой.
На рис. 39а представлена независимая сеть целевой точки S1. Пунктирными линиями отделяются группы точек, присоединяемых к сети на каждом этапе ее конструирования. На рисунке специально выделены и пронумерованы в порядке их определения подставные точки. Значительная часть участков сети совпадает с автомобильными проездами, идущими вдоль домов. На рис. 39б показана независимая сеть целевой точки S13 (элементы процесса построения сети рассмотрены в разделе 2).
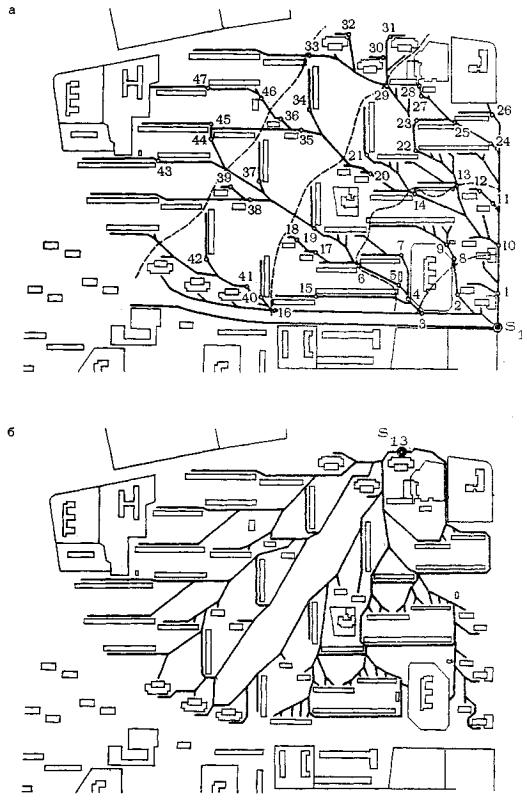
Рис. 39. Квартал № 10. Независимые сети целевых точек S1 и S13: a - независимая сеть целевой точки S1(пунктирными линиями выделяются группы исходных точек, присоединяемых к сети на каждом этапе построения по мере удаления от целевой точки); б - независимая сеть целевой точки S13
3.1.6. После того как построены независимые сети всех целевых точек (закончен первый этап конструирования сети), осуществляется построение интегральной сети. Для сети квартала № 10 был принят следующий порядок кооперирования независимых сетей (целевые точки здесь представлены не буквенными обозначениями с индексами, а только индексами):
(((1, 2, 3, 4, 5, 39, 40, 41) (18, 19, 20, 21, 22, 23, 24))
((6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17)
(25, 26, 27, 28, 29, 30, 31, 32, 33, 34, 35, 36, 37)))
Интегральная сеть представлена на рис. 40.
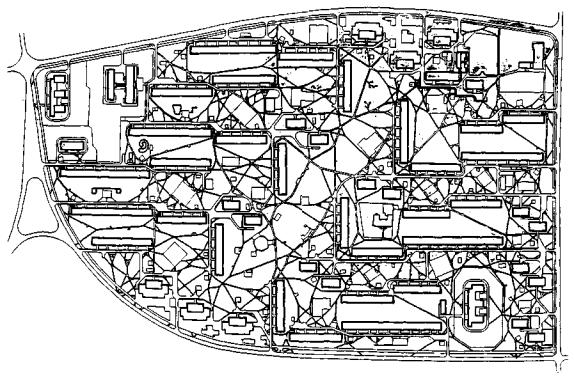
Рис. 40. Квартал № 10. Проект пешеходной сети (вариант 1) и размещения площадок
3.1.7. Вслед за построением интегральной сети проводится работа по размещению на территории жилого комплекса площадок различного назначения и основных элементов озеленения. Если наличие тех или иных участков сети не позволяет должным образом разместить необходимые площадки или элементы озеленения, сеть должна быть скорректирована. В этом случае производится размещение каждой площадки в нужном месте, а соответствующие участки сети направляются в обход этого места, рассматриваемого как препятствие. Разумеется, следует стремиться к тому, чтобы корректировка сети была минимальной. Поскольку подобные меры зачастую ведут к утрате рядом участков сети локально-естественной жизнеспособности, следует принять меры, обеспечивающие отсутствие конфликтных ситуаций в местах корректировки, отсутствие транзита через размещаемые в этих местах площадки или элементы озеленения. Эти меры заключаются в создании системы искусственных препятствий, ограждающих данный участок территории. Приемлемый тип преград - непрозрачные стенки высотой более человеческого роста, наименее болезненно действующие на психику пешехода. Во многих случаях, однако, возможна корректировка сети без нарушения ее локально-естественной жизнеспособности за счет излома прямолинейных участков в пределах соответствующих рабочих полей. В результате такой корректировки происходит лишь небольшое увеличение общей длины сети. Такая корректировка называется мягкой, в отличие от жесткой корректировки, требующей создания искусственных преград.
3.1.8. Корректировкой интегральной сети (если она требуется) и сопряжением ее участков (см. раздел 2.4) завершаются процедуры, связанные с определением конфигурации пешеходной сети. Дальнейший этап работы состоит в расчете потоков на участках интегральной сети (см. раздел 2.4). Сюда входят следующие основные операции: расчет потоков на участках экстрагированных сетей отдельных целевых точек, последующий перенос этих потоков на соответствующие участки интегральной сети и суммирование совпадающих во времени потоков.
Для построения экстрагированной сети достаточно проследить по интегральной сети маршруты движения из целевой точки к исходным точкам ее ареала и каким-либо образом зафиксировать эти участки, входящие в данные группы маршрутов. Конфигурация экстрагированной сети близка к конфигурации соответствующей независимой сети. Конфигурации экстрагированных сетей целевых точек S1 и S13 рассматриваемого квартала представлены на рис. 41а, 41б (сравнить с рис. 39а, 39б).
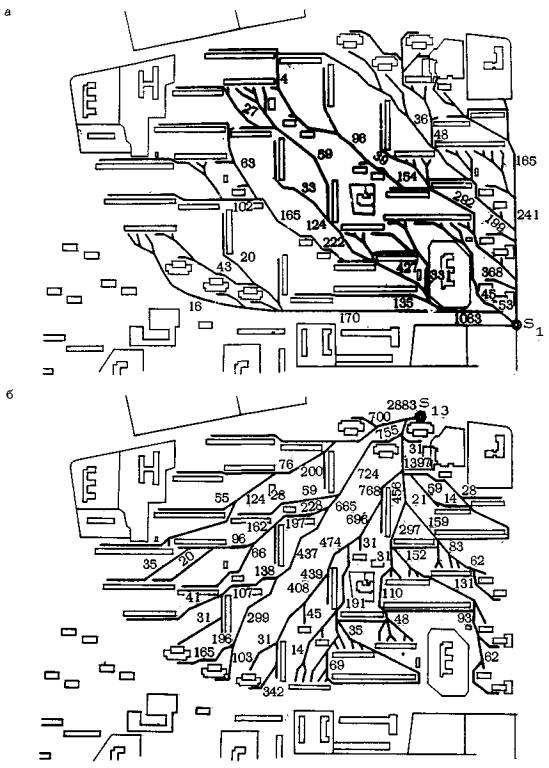
Рис. 41. Квартал № 10. Расчет потоков на экстрагированных сетях целевых точек S1 и S13: а - потоки на экстрагированной сети целевой точки S1; б - потоки на экстрагированной сети целевой точки S13
После того как рассчитаны потоки на участках всех экстрагированных сетей, производится расчет потоков на участках интегральной сети и устанавливаются сечения участков.
Полученное решение должно быть дополнительно проанализировано и оценено проектировщиком. Может оказаться, что, например, через двор какого-либо жилого дома направляется чрезмерно большой поток пешеходов, что нежелательно, поскольку нарушается нормальное функционирование придомового пространства. Не исключено, что этого можно избежать, приняв другую конфигурацию пешеходной сети в рамках ее жизнеспособности. Возможно, что плотность сети в целом или на локальных участках покажется проектировщику избыточной либо из экономических, либо из функциональных соображений (например, из соображений, связанных с озеленением территории). В подобных случаях, исходя из возможностей, которыми располагает проектировщик на данной стадии, следует принять те или иные меры для регулирования параметров и общей конфигурации сети. Эти вопросы обсуждаются в разделе 3.2.
Технические и организационные вопросы
Технических препятствий для работы с помощью линейки и циркуля в любом стандартном масштабе - от 1:10000 до ??? - нет. Тем не менее в большинстве случаев можно рекомендовать работу в масштабе 1:5000 для объектов с территорией от 0,2 до 4,0 км2 (от 20 до 400 га) и в масштабе 1:2000 для объектов с территорией от 0,05 до 0,2 км2 (от 5 до 20 га). Чертежи более крупных масштабов желательно иметь только при расчете потоков и сечений участков сети, поскольку рядом с каждым участком необходимо указывать соответствующие величины.
При построении сети удобно использовать подоснову, на которой каким-либо ярким цветом выделены все препятствия и нанесена существующая сеть пешеходных путей (включая и проезды, используемые пешеходами), а также все исходные и целевые точки. Сами построения удобно вести на кальке, накладываемой на подоснову. На отдельных листах кальки строятся независимые сети и фиксируются этапы построения интегральной сети.
В организационном отношении важен вопрос о трудоемкости работ по конструированию пешеходных путей. Опыт показывает, что при наличии у проектировщика практических навыков пешеходная сеть крупного микрорайона может быть запроектирована за время порядка 50 рабочих часов, из которых около половины занимает определение конфигурации интегральной сети и примерно столько же - расчет потоков на сети.
Немаловажным обстоятельством является возможность разделения труда при конструировании пешеходной сети. Например, построение независимых сетей, групповое интегрирование и расчет потоков на экстрагированных сетях могут вестись двумя или тремя исполнителями, работающими каждый независимо от других со своей группой целевых точек. В результате вместо шести рабочих дней все работы могут быть закончены в течение трех дней.
3.2. КОНСТРУИРОВАНИЕ ПЕШЕХОДНОЙ СЕТИ ВО ВЗАИМОСВЯЗИ С ДРУГИМИ ПОДСИСТЕМАМИ
Средства регулирования плотности пешеходных сетей
3.2.1. Рассмотрим те возможности, которыми располагает проектировщик для влияния на конфигурацию сети и ее основные характеристики, не входя в противоречие с основными положениями раздела 1 и используя процедуры, описанные в разделе 2.
В качестве примера вновь рассмотрим пешеходную сеть квартала № 10 Химки-Ховрино (рис. 40). Предположим, что проектировщик, построив эту сеть, стремится из каких-либо соображений уменьшить ее плотность, не внося изменений в жилую застройку. Каким образом можно этого достичь?
Для этого имеется два эффективных средства, которые можно использовать как порознь, так и вместе: внесение изменений в систему целевых точек и использование системы искусственных препятствий.
3.2.2. Анализируя систему целевых точек в квартале № 10 Химки-Ховрино, мы обнаруживаем в их числе набор мелких независимых и отчасти случайных для микрорайона учреждений, разбросанных в различных местах в пристройках к жилым домам. Часть этих учреждений в микрорайоне можно ликвидировать, а часть собрать компактно в одну целевую точку. Некоторые изменения можно внести и в размещение остановок общественного транспорта.
Учитывая эти изменения, строим заново интегральную сеть. При этом существенно используются промежуточные материалы, которые служили основой для формирования прежней интегральной сети, прежде всего - построенные ранее независимые сети, а именно те из них, которые соответствуют целевым точкам новой системы. В значительной мере могут быть использованы также результаты различных этапов кооперирования.
Заново построенная интегральная сеть квартала № 10 Химки-Ховрино, соответствующая новой системе целевых точек, представлена на рис. 42 (размещение площадок здесь опущено). Как видно из сравнения с вариантом 1 (см. рис. 40), плотность сети в данном варианте значительно ниже (таблица), и, следовательно, цель, которая преследовалась внесением изменений в размещение объектов культбыта, достигнута.
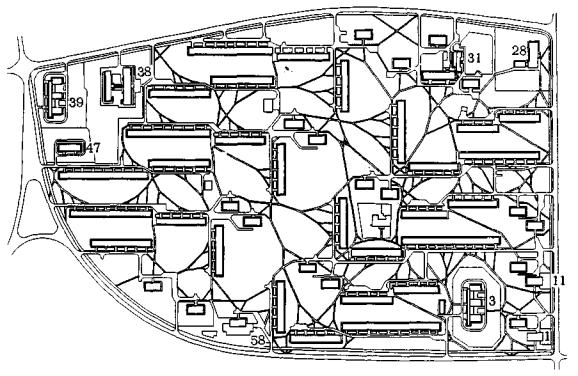
1 - комбинат бытового обслуживания; 3 - детский сад-ясли на 280 мест; 11 - столовая на 200 посадочных мест: 28 - школа на 880 учащихся; 31 - детский сад-ясли на 100 мест; 38 - школа на 960 учащихся; 39 - детский сад-ясли на 280 мест; 47 - детский сад-ясли на 140 мест; 58 - продовольственный магазин на 21 рабочее место
Рис. 42. Квартал № 10. Проект пешеходной сети (вариант 2). По сравнению с вариантом 1 плотность сети в варианте 2 существенно уменьшена за счет сокращения числа целевых точек
3.2.3. Другим средством, которое может быть использовано для уменьшения плотности сети, является, как было уже отмечено, введение системы искусственных препятствий. Используемое разумно и тактично, оно лишь незначительно снижает комфорт сети, в то же время заметно отражаясь на ее плотности.
Можно, например, пойти по пути разуплотнения сети в верхних ее отделах, т.е. в окрестности исходных точек. В самом деле, рассматривая сеть квартала № 10 в вариантах 1 и 2, легко заметить, что места ее наибольшей локальной плотности, как правило, находятся вблизи группы подъездов каждого из многосекционных домов. Если в качестве исходных точек при построении независимых сетей рассматривать не каждый подъезд такого дома, то тем самым будет достигнуто локальное снижение плотности. Но тогда, во избежание протаптывания стихийных дорожек от подъездов, которые не вошли в число исходных точек, необходимо создать систему локальных искусственных препятствий (например, бетонных стенок, традиционных трубчатых оград и посадок кустарников), направляющих пешеходов из этих подъездов на дорожки к соседним подъездам.
Таблица
Технико-экономическое сравнение вариантов пешеходной сети квартала № 10 р-на Химки-Ховрино
|
Основные показатели |
Варианты |
Показатели по др. проектам |
|||
|
1 |
2 |
3 |
|||
|
1. |
Общая длина сети, м |
18200 |
10450 |
9180 |
- |
|
|
% |
100,0 |
57,5 |
50,5 |
- |
|
2. |
Плотность сети, м/га |
520 |
298 |
262 |
380 |
|
|
% |
100 |
57,5 |
50,5 |
73,1 |
|
3. |
Средняя ширина пешеходной дороги, м |
1,3 |
1,69 |
1,78 |
|
|
|
% |
100 |
130 |
137 |
- |
|
4. |
Общая площадь покрытий пешеходных дорог, м |
23600 |
17640 |
16330 |
|
|
|
% |
100 |
74,8 |
69,3 |
- |
|
5. |
Удельная площадь покрытий, м2/м2 ж.п. |
0,163 |
0,122 |
0,113 |
0,170 |
|
|
% |
100 |
74,8 |
69,3 |
104,0 |
|
6. |
Средневзвешенный коэффициент непрямолинейности |
1,13 |
1,13 |
1,14 |
1,35 |
|
7. |
Сравнительные затраты времени на передвижение, % |
100 |
100 |
101 |
120 |
|
8. |
Перепробег, % |
100 |
100 |
108 |
270 |
Подобный подход к разуплотнению сети с помощью системы искусственных препятствий реализован при построении варианта 3 квартала № 10 Химки-Ховрино (рис. 43), где в качестве исходного принят вариант 2. Сама система препятствий на чертеже не показана по чисто техническим соображениям, но места локальных препятствий читатель без труда определит напротив тех подъездов, к которым, в отличие от варианта 2, здесь нет собственной дорожки. Заметим, что комфорт сети в данном варианте лишь незначительно уменьшается по сравнению с комфортом сети в варианте 2. В самом деле, жители некоторой части подъездов будут испытывать дополнительный дискомфорт лишь на участке своего пути к ближайшей дорожке, идущей к соседнему подъезду. В то же время, дальнейшая часть любого маршрута не уступает в смысле комфорта варианту 2. Переход от варианта 2 к варианту 3 отнюдь не требует построения заново всех независимых путей и проведения всех этапов интегрирования. Можно просто внести локальные изменения в интегральную сеть варианта 2, что и было в данном случае сделано.
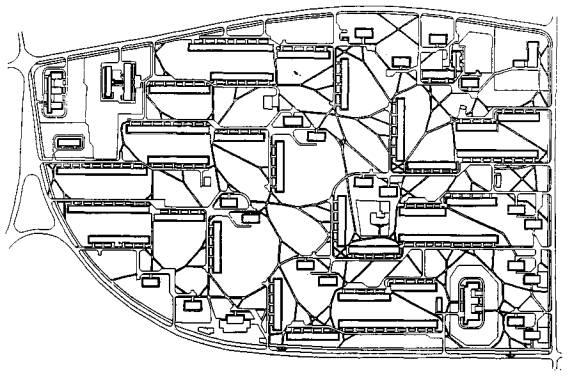
Рис. 43, Квартал № 10. Проект пешеходной сети (вариант 3). По сравнению с вариантом 2 плотность сети в варианте 3 уменьшена за счет сокращения числа исходных точек (в качестве исходных точек принимаются не все подъезды жилых ломов, а через один)
3.2.4. Сопоставим основные характеристики трех рассмотренных вариантов сети в квартале № 10 Химки-Ховрино, а также средние показатели по ряду реальных проектов, выполненных в ЦНИИП градостроительства традиционным образом, без применения настоящей методики (микрорайоны Липецка, Владивостока, Караганды и некоторых других городов).
Плотность сети в варианте 2 на 42,5%, а в варианте 3 почти вдвое меньше, чем плотность сети в варианте 1. Очевидно, что цель, поставленная при разработке этих вариантов, успешно достигнута. Наряду с уменьшением плотности сети, благотворно отражающемся на озеленении квартала, снижаются и затраты на ее строительство, так как общая площадь покрытий пешеходных дорог во втором варианте на 25,2%, а в третьем на 30,7% ниже, чем в первом (отличие от соотношения показателей по длине сети объясняется увеличением ширины некоторых ее участков в связи с увеличением потоков по ним по мере уменьшения плотности сети). Плотность сети в среднем по группе традиционных проектов занимает промежуточное положение между первым и вторым вариантами, но ее комфортные характеристики значительно хуже.
3.2.5. Создание рациональной системы искусственных препятствий полезно во многих случаях не только как средство разуплотнения сети пешеходных путей, но и с точки зрения решения ряда планировочных задач, связанных с функциональным зонированием территории жилого комплекса, в частности, для создания зон, изолированных от транзитного пешеходного движения и предназначенных для таких функций, как тихий отдых и спорт. В этом случае в качестве системы препятствий мы должны рассматривать прежде всего саму жилую застройку.
Гибкость и устойчивость пешеходных сетей. Учет эстетических факторов
3.2.6. В комплексе вопросов, возникающих при решении задач планировки и застройки, в том числе при взаимосвязанном решении жилой застройки и пешеходной сети в жилом комплексе, существенную роль играют вопросы эстетического характера. Композиция застройки воспринимается в динамике, в процессе движения пешехода по маршрутам реально функционирующей пешеходной сети. В какой мере вопросы эстетического восприятия застройки могут быть учтены при конструировании сети пешеходных путей?
До сих пор мы фиксировали свое внимание исключительно на той конфигурации сети, которая является решением оптимизационной задачи. Рассматривая такое решение как базовое, исходное, мы можем подвергнуть его мягкой корректировке (см. раздел 3.1) с целью учета дополнительных соображений - эстетических и климатических. В некоторых случаях имеет смысл учитывать эти факторы с самого начала, включая, например, важные видовые точки в число целевых точек. При проектировании парков некоторым прямолинейным участкам на прогулочных маршрутах можно придавать мягкую криволинейность. Удлинение сети при этом столь незначительно (до 5% на корректируемых участках и до 0,5% в целом по сети), что оно не может служить препятствием для такого рода корректировок.
Принятие подобных допущений придает всей рассматриваемой методике, а вместе с ней и конструируемой сети достаточную гибкость и возможность учета многих дополнительных требований.
3.2.7. Наряду с гибкостью важным свойством пешеходных сетей является устойчивость к возмущениям. Речь в данном случае идет не столько о проектировании сетей, сколько об их функционировании. Предположим, что мы запроектировали и создали в натуре оптимальную жизнеспособную сеть пешеходных путей. В первое время после строительства она будет функционировать нормально. Однако постепенно градостроительная ситуация, в которой она находится, начнет претерпевать изменения, которые можно рассматривать как возмущающие воздействия. Эти изменения могут затрагивать сферу культбыта, систему транспорта, размещение мест приложения труда как в непосредственной пространственной близости к данному жилому комплексу, так и в отдалении от него. В зависимости от характера и масштаба изменений их действие будет сказываться в большей или меньшей мере на функционировании пешеходной сети. Наиболее наглядным результатом во многих случаях будет возникновение стихийных пешеходных путей, дополняющих существующую сеть. Такого рода явление можно рассматривать как реакцию сети на возмущающее воздействие. Важным свойством пешеходной сети является то, что область возмущения затрагивает, как правило, не всю сеть, а только некоторую окрестность источника возмущения, тем меньшую, чем меньше само возмущение (рис. 44).
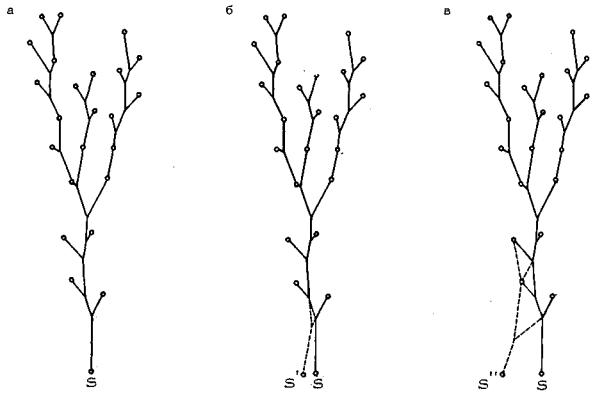
Рис. 44. Устойчивость сети к малым возмущениям (пунктирной линией показаны вновь возникающие участки сети): а - исходное положение; б - при малом возмущении (смешении) целевой точки изменения охватывают малую ее окрестность; в - чем больше величина возмущения целевой точки, тем на большую глубину распространяется область изменения пешеходной сети
Явление сохранения работоспособности основной части естественно-жизнеспособной сети при изменении в известных пределах размещения целевых точек будем называть устойчивостью к малым возмущениям. Разумеется, если возмущения слишком велики, то сеть теряет работоспособность практически полностью.
3.2.8. Система препятствий увеличивает устойчивость пешеходной сети к возмущениям. При достаточно развитой системе препятствий, что типично для распространенной в настоящее время системы застройки, сеть проявляет высокую устойчивость к возмущениям. В пределах срока амортизации жилых зданий основным источником возмущений, очевидно, будут смещения целевых точек, а также возникновение новых и исчезновение старых. Разумеется, интенсивность этих изменений в большинстве случаев невелика, и они могут стать заметными лишь по прошествии длительного срока жизни жилого комплекса. Область распространения возмущений будет, как правило, локализована на периферии межмагистральных территорий, в полосе, прилегающей к магистралям, где размещаются объекты, наиболее подверженные переменам. Вся остальная территория будет иметь стабильно функционирующую сеть пешеходных путей, за исключением зон кратковременных локальных возмущений, связанных с ремонтом как самой пешеходной сети, так и других внутриквартальных сетей.
По истечении срока амортизации жилых зданий, когда начинается реконструкция жилой застройки, сеть пешеходных путей в большинстве случаев также должна быть реконструирована. Масштабы этой реконструкции будут определяться масштабами изменений в жилой застройке и в размещении объектов культурно-бытового обслуживания.
Пешеходные и транспортные сети на разных этапах проектирования города
3.2.9. Проанализировав с различных точек зрения взаимосвязь пешеходной сети с жилой застройкой, системой объектов культурно-бытового обслуживания и с системой препятствий, рассмотрим теперь взаимосвязь между пешеходной и транспортной сетями города. Наиболее важными в этой проблеме являются два вопроса: о роли пешеходной и транспортной сетей в обеспечении внутригородских сообщений малых и больших городов, соответствующем их соотношении в процессе проектирования города на разных стадиях о безопасности движения.
3.2.10. В малых городах основой планировочной структуры на всех уровнях является (или по крайней мере должна быть) пешеходная сеть. Транспортная сеть играет второстепенную роль, и использование ее для реализации внутригородских, перемещений носит ограниченный характер.
На ранних стадиях проектирования, когда решены только вопросы функционального зонирования, возникает одна характерная трудность при попытках построить планировочную структуру на основе пешеходной сети. Исходной информацией для построения пешеходной сети служит размещение исходных точек, системы препятствий и целевых точек (если не всех, то соответствующего ранга). В качестве исходных точек рассматриваются прежде всего входы в жилые дома, а в качестве препятствий - их габариты. Но вопросы жилой застройки должны быть решены позднее, исходя из конфигурации пешеходной сети. Возникает порочный круг. Выход из этого затруднения состоит в последовательно иерархическом подходе. В рассмотрение вводится система фиктивных исходных точек, каждая из которых символизирует целую группу действительных исходных точек, которые появятся впоследствии, например, группу, соответствующую жилому дому. Для этого вся жилая зона, конфигурация которой получена на стадии функционального зонирования территории города, покрывается регулярной сеткой, например, квадратной, а узлы ее принимаются в качестве фиктивных исходных точек. Размер ячейки можно принять в зависимости от размера рассматриваемой территории и типа застройки, например, 100´100 м или 200´200 м. Размещение целевых точек может быть произведено либо одновременно с функциональным зонированием, либо сразу после него. В качестве препятствий рассматриваются только естественные препятствия и те искусственные препятствия, которые на данной стадии считаются зафиксированными.
Теперь имеется вся необходимая информация для построения пешеходной сети. Построив независимые сети, мы ликвидируем верхнюю часть каждого из деревьев, так сказать, "крону", оставив для дальнейшего только основные "ветви". Кооперируя эти "подстриженные" деревья, мы получим интегральную сеть первого ранга (каркас), которая послужит основой для решения дальнейших задач. Впоследствии направления "обрезанных" верхних ветвей могут дать ценную информацию для решения вопросов застройки.
Описанный прием иллюстрируется рис. 45, на котором представлена пешеходная сеть, связывающая фиктивные точки жилой зоны с целевой точкой первого ранга, расположенной в городском центре. Этот прием гложет быть использован при проектировании не только малых городов, но и отдельных районов больших городов на стадии проекта детальной планировки.
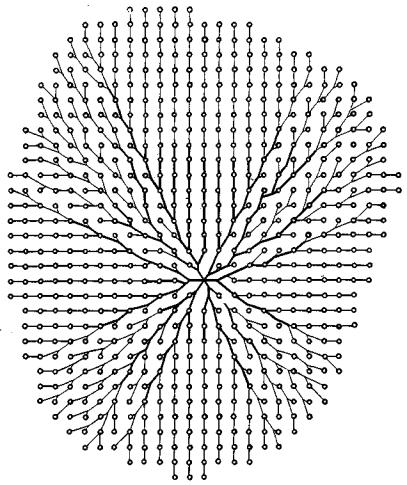
Рис. 45. Каркасная пешеходная сеть - основа планировочной структуры малого города. Построение каркасной сети в условиях, когда застройка еще не определена: для построения используются фиктивные исходные точки - центры ячеек регулярной сетки; после построения каркасной сети (обозначена жирной линией) фиктивные точки удаляются вместе с периферийной, (некаркасной) частью сети
3.2.11. В больших городах основу структуры образует сеть транспортных магистралей. Поскольку площадь больших городов велика, то дальние внутригородские корреспонденции не могут реализоваться пешеходной сетью, и в этом смысле пешеходная сеть не может иметь того безусловного единства и цельности, которые необходимы при проектировании внутрирайонной сети или сети пешеходных путей в малых городах. Само проектирование может вестись фрагментарно, в рамках разработки проекта планировки и застройки района.
Однако в действительности отдельные фрагменты сети не изолированы, они частично накладываются друг на друга. В этом смысле пешеходная сеть любого города непрерывна, и проектируемые фрагменты сети должны увязываться друг с другом. Степень такого рода увязки существенно зависит от того, отделены ли фрагменты друг от друга или нет каким-либо препятствием, может быть, с выколотыми точками. Например, препятствие может представлять собой транспортную магистраль с фиксированными местами перехода через нее. В таких случаях степень необходимой увязки фрагментов, лежащих по разные стороны от магистрали, невелика. Достаточно при проектировании фрагментов учесть наличие переходов через магистраль как транзитных целевых точек, а при расчете корреспонденции и потоков учесть связи между фрагментами, в частности, в отношении системы объектов обслуживания.
3.2.12. Существенно более тесной должна быть увязка фрагментов при отсутствии между ними препятствий (улицы с нефиксированными местами перехода не являются для пешеходов препятствиями). При проектировании таких сетей, а также сетей на межмагистральных территориях, одна из сложных проблем - это проблема безопасности пешеходного движения. Очевидно, что в рамках современных, повсеместно используемых технических решений планировки и застройки обеспечить полную или хотя бы существенную изоляцию пешеходов от автомобильного транспорта невозможно. Поэтому речь может идти лишь о путях уменьшения вероятности несчастных случаев.
С этой целью определяются места пересечения пешеходных потоков с улицами и внутриквартальными проездами. Число таких пересечений из соображений безопасности движения необходимо сводить к минимуму, используя для этого все средства, доступные проектировщику на данном этапе разработки проекта: гибкость пешеходной сети, позволяющая направлять потоки в желательное русло (в рамках условия жизнеспособности сети); возможности манипуляции элементами планировки и застройки для создания разумной системы препятствий, организующей я направляющей пешеходные потоки; возможности организации системы внутриквартальных проездов в тесной увязке с сетью пешеходных путей; возможности влияния на размещение целевых точек, таких как объекты сферы обслуживания и остановки транспорта.
Пешеходные сети различных планировочных объектов
3.2.13. Вопросы практического конструирования пешеходных сетей рассматривались применительно к таким объектам, как жилой комплекс и, отчасти, город в целом. Однако весь комплекс рассмотренных проблем и практических подходов к их решению, по существу, может быть отнесен к самым различным планировочным объектам: территориям промышленных предприятий и предзаводских зон, городским паркам и выставочным территориям, городским и районным центрам (спортивным, больничным, учебным) к территориям непосредственного окружения отдельных зданий и т.д.
В самом деле, математическая задача в разделе 1 и весь круг понятий, привлекаемых к ее решению, формируются в достаточно общем виде, безотносительно к характеру рассматриваемого объекта. Содержательный характер носит только фаза представления исходных данных в терминах этой задачи (исходные и целевые точки, система препятствий, существующая сеть), непосредственное же конструирование сети ведется формально.
3.2.14. В качестве примера построения пешеходной сети для объекта, отличного от жилого комплекса, приведем международный молодежный лагерь "Айнур" на озере Иссык-Куль (рис. 46), проект которого разрабатывался в 1969 - 70 гг. институтом "Союзспортпроект" (главный архитектор проекта О.В. Федоров).
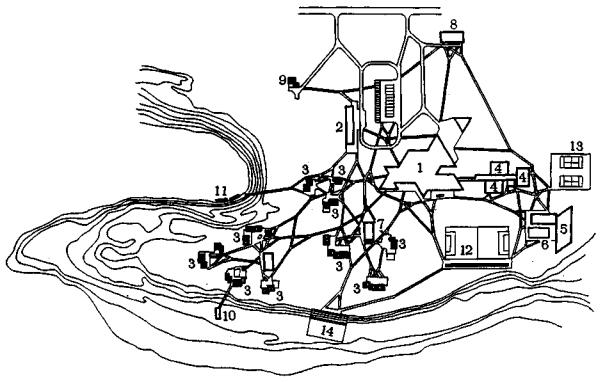
1 - общественный центр; 2 - административный блок; 3 - летние жилые помещения; 4 - зимний жилой корпус; 5 - спортивный зал; 6 - открытый бассейн; 7 - санитарные узлы; 8 - дом для обслуживающего персонала; 9 - летний изолятор; 10 - душевая на пляже; 11 - лодочная станция; 12 - футбольное поле; 13 - теннисные корты; 14 - спортивная площадка
Рис. 46. Пешеходная сеть молодежного лагеря "Айнур" (проект)